



隨動刀庫的任意換刀點的控制
2021-8-13 來源: 沈機集團昆明機床股份有限公司 作者:李攀科,楊林,鄒濤,高鵬飛
摘要: 文中介紹了運用 SINUMERIK 840D sl 實現隨動刀庫任意換刀點控制的一種方法。按隨動刀庫定位坐標的計算公式實現刀庫的初次定位,然后運用距離檢測接近開關檢測刀套位置,采用 PLC 控制數控軸的增量定位功能進行定位微調,最終實現隨動刀庫的精確定位控制。
關鍵詞: 隨動刀庫; 任意換刀點控制
1 、隨動刀庫的換刀方式
動梁式龍門機床,它的刀庫安裝在龍門立柱上,換刀手臂在動梁上,其機械結構如圖 1 所示。由于立柱與動梁在垂直方向上存在著相對運動,導致換刀點會隨著動梁的移動而不斷改變,即在動梁運動的 AB 區間的任意位置均可換刀。這種刀庫被稱為隨動刀庫,換刀方式也被稱之為任意換刀點或隨機換刀點的刀庫控制。有以下特點: ( 1) 刀庫任意換刀點的坐標計算公式; ( 2) 實際換刀點與計算坐標間的位置誤差的消除。
2、 刀庫換刀點的坐標計算公式
根據刀庫與機床的機械結構,動梁運動為雙電機、雙絲桿、雙光柵尺的標準直線龍門軸 W 軸; 刀庫旋轉則是以伺服電機編碼器為位置檢測的半閉環控制,被定義成標準旋轉軸 C 軸。坐標定義方向如圖 1。
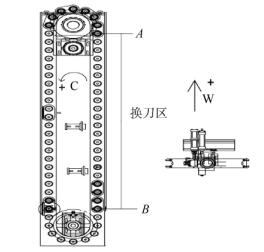
圖1 刀庫機械結構圖
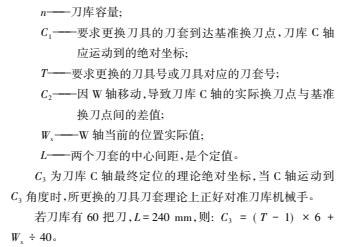
建立一個基準換刀點,如圖 2 中的 A 點,令 1 號刀套正好在A 點上,且刀套的中心對準刀庫機械手爪的中心,此時,刀庫 C軸坐標設置成 0 度,動梁 W 軸也設定成機床的坐標原點,W 軸為負坐標。可推導出,當 W 軸停在 AB 換刀區任一某處,運行換刀指令進行找刀或還刀控制時,刀庫 C 軸最終定位的理論絕對坐標的計算公式為:

3、刀庫旋轉運動控制
3. 1 自動換刀的刀庫旋轉運動
自動換刀的刀庫旋轉運動是指加工程序在運行換刀指令后,C 軸運動刀庫將取刀或還刀刀套運動到換刀點的控制。可用兩種方法。
方法 1: 直接運用 NC 程序,根據 NC 能直接讀取數控系統的相關變量,運用 NC 編程的計算操作及計算功能,直接按式
( 1) 進行軸定位實現。
例如,以 60 把刀,固定刀套,兩個刀的中心距為 240 mm 為例,換刀子程序如圖 2 所示編寫。
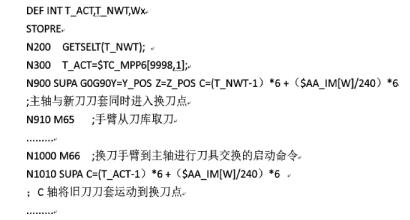
圖 2 隨動刀庫的換刀子程序
程序中:
“( T_NWT-1) * 6 +( $ AA_IM[W]/240) * 6”是新刀具的刀套到達換刀點的坐標值; $ AA_IM[W],表示機床坐標系中當前 W 軸的實際值; T_NWT,表示目標刀具號,也就是編程刀具號。
“( T_ACT-1) * 6 +( $ AA_IM[W]/240) * 6”則是舊刀的刀套到達換刀點的坐標值,$ TC_MPP6[9998,1]與 T_ACT,表示換刀前主軸上的刀具號。
可見,刀庫運動將新刀刀套運動到換刀點與機床主軸運動到換刀點的控制是通過 NC 程序同時實現; 另外 PLC 控制刀臂進行刀對刀的交換過程中,NC 程序同時將還刀刀套運動到了換刀點,為等待舊刀還回刀套。這種刀庫運動的編程比較簡單,但刀庫運動控制占用 NC 資源,適用于大重型機床的固定刀套方式的換刀控制。
方法 2: 借助 PLC 程序模塊 FC18 ( SpinCtrl) 實現 C 軸定位。FC18 功能模塊是由 PLC 控制主軸或其他進給軸,實現數控軸的定位位置、速度、運動方向的控制,它有定位主軸、分度軸、定位軸等 11 種功能,有 6 種工作模式,如: 定位到絕對位置、增量定位、最短路徑定位等。編程時需根據具體的軸設定及控制要求選擇相應的模式及功能,并通過觸發信號的上升沿啟動或停止軸的運動。
此方法,PLC 控制的刀庫運動與 NC 程序同時進行,換刀效率高,缺點是 PLC 的編程工作量大。首先 W 軸的位置實際值是 PLC 程序通過調用 FB2 功能塊從 NC 變量 measPos2[.]中讀取; 然后根據式( 1) ,運用 PLC 的算術計算語句,將刀庫需定位的絕對坐標值計算出來,賦值給存儲器,其中新刀及舊刀的刀套號分別是西門子 840D sl 刀庫管理提供的刀具管理數據接口DB72.DBWn+22 和 DB72.DBWn+26; 最后通過 PLC 調用 FC18模塊來控制 C 軸旋轉實現刀庫的初步定位,此時 FC18 的工作方式是定位軸絕對坐標最短路徑定位,編程如圖 3 所示。
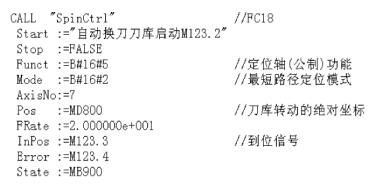
圖 3 刀庫定位的 FC18 調用
3. 2 刀庫定位檢測與微調
刀庫是采用進給伺服電機轉動齒輪帶動鏈條進行運動的,控制方式是電機內置編碼器的半閉環控制,僅依靠換刀點的坐標計算公式來定位刀庫,不能滿足換刀要求,需要通過安裝在動梁上的刀庫手臂導軌架上的兩個距離檢測接近開關( 如圖 4) 對已經初步定位的刀套進行偏離檢測。
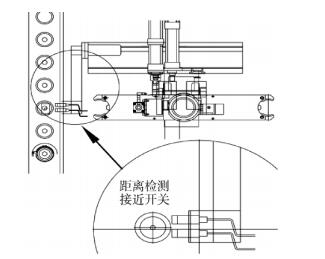
圖 4 距離檢測接近開關
兩個接近開關的輸出信號是 4 ~ 20 mA 電流信號,經模擬量輸入接口模塊傳遞給 PLC。PLC 調用 FC18 功能模塊實現刀庫定位微調,程序如圖 5 所示。
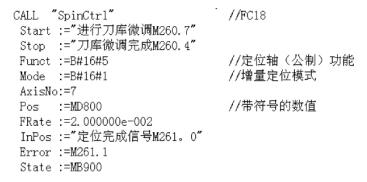
圖 5 刀庫定位微調的 FC18 調用
圖 5 中,FC18 功能模塊采用控制啟動與停止的定位軸增量定位控制方式: PLC 直接對輸入數據 PIW 進行大小比較,比較值大于設定值時,啟動 FC18 運動 C 軸; 運動方向則是通過帶符號的增量距離實現,設定的增量距離值要大于刀套最大的偏離距離; 當比較值小于設定值時,即使設定的增量距離沒有運動完成,也要停止 C 軸的運動。
3. 3 手動換刀的刀庫旋轉運動控制
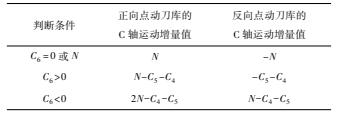
手動操作刀庫對于大重型龍門機床是必要的,其中手動刀庫旋轉將刀套運動到換刀點的操作方法有兩種: 一種是將指定刀套直接運動到換刀點,實現的方法如自動換刀的 PLC 刀庫旋轉運動控制; 另一種是將刀套一個一個的單步順序運動到換刀點,這也被稱為刀庫點動操作。在交換刀具前都需要進行刀庫定位微調。刀庫點動操作的控制需要運用下面 3 個公式( 式( 2) ~ 式
( 4) ) 及表 1( 刀庫手動判斷表) 來進行刀庫定位。

C6 計算出的值僅是一個判斷條件。當刀庫點動操作時,每運動一個刀套,需根據表 1 的判斷條件及操作要求運行一次FC18,FC18 進行的是 C 軸的增量定位,可實現刀庫點動操作。
表 1 刀庫手動判斷表
4、 總結
綜上所述,找到了刀庫軸圓周運動角度、動梁軸直線坐標、任意換刀點三者之間的計算公式,實現刀庫在理論上初步定位,也找到了運用距離檢測接近開關進行刀庫定位檢測與微調的控制方法,最終靈活運用 FC18 功能模塊實現隨動刀庫的任意換刀點控制。
投稿箱:
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信息

