螺紋數(shù)控修復(fù)車床主軸部件動(dòng)態(tài)特性分析(下)
2017-4-7 來(lái)源:沈陽(yáng)工業(yè)大學(xué) 作者:肖磊
第 4 章 主軸動(dòng)態(tài)試驗(yàn)研究
第 3 章對(duì)螺紋數(shù)控修復(fù)車床的主軸部件進(jìn)行了動(dòng)態(tài)特性分析,得到了該車床主軸在不同約束條件下的固有頻率和振型。在車床實(shí)際加工過程中,主軸動(dòng)態(tài)特性受到的影響因素很多,軸承支撐剛度的計(jì)算也只是依靠經(jīng)驗(yàn)公式計(jì)算出來(lái)的,并不是準(zhǔn)確的定值,所以有限元?jiǎng)討B(tài)分析結(jié)果可能會(huì)受到影響。下面對(duì)主軸進(jìn)行動(dòng)態(tài)試驗(yàn)分析,研究主軸在實(shí)際工況下的動(dòng)態(tài)特性,比較有限元分析結(jié)果與試驗(yàn)分析結(jié)果,檢驗(yàn)有限元分析結(jié)果的準(zhǔn)確性,同時(shí),利用動(dòng)態(tài)試驗(yàn)分析結(jié)果修改有限元?jiǎng)討B(tài)分析參數(shù),進(jìn)一步對(duì)主軸動(dòng)態(tài)特性作預(yù)測(cè)分析。
4.1 試驗(yàn)?zāi)B(tài)分析簡(jiǎn)介
動(dòng)態(tài)試驗(yàn)分析技術(shù)最早以 20 世紀(jì) 30 年代的機(jī)械阻抗技術(shù)為基礎(chǔ),隨著計(jì)算機(jī)技術(shù)的發(fā)展,動(dòng)態(tài)試驗(yàn)分析技術(shù)應(yīng)運(yùn)而生,其發(fā)展歷程主要包含三個(gè)階段。
(1)單輸入/單輸出法:起源于 70 年代初期,通過各自擬合每一測(cè)點(diǎn)的頻響函數(shù)以獲得結(jié)構(gòu)系統(tǒng)的固有頻率和振型。主要應(yīng)用于單自由度、純模態(tài)和模態(tài)密度稀疏的分析情況,但這種方法計(jì)算量大,且準(zhǔn)確度不高。
(2)單輸入多輸出法:出現(xiàn)在 70 年代末期。通過整體擬合全部測(cè)點(diǎn)的所有頻響函數(shù)數(shù)據(jù),獲得結(jié)構(gòu)系統(tǒng)相對(duì)準(zhǔn)確的固有頻率和阻尼比。但在試驗(yàn)過程中如果激振點(diǎn)恰選在某階模態(tài)的節(jié)點(diǎn)上,會(huì)導(dǎo)致遺漏可能存在的模態(tài)參數(shù)。
(3)多輸入多輸出法:基于多點(diǎn)激振測(cè)試技術(shù),出現(xiàn)于 80 年代。該方法對(duì)多個(gè)頻響函數(shù)數(shù)據(jù)進(jìn)行擬合,可以忽略因環(huán)境不同、支撐條件的變化和激振設(shè)備位置變化等引起的誤差,廣泛應(yīng)用于體積較大、結(jié)構(gòu)復(fù)雜的系統(tǒng)。
動(dòng)態(tài)試驗(yàn)研究主要是指結(jié)構(gòu)的模態(tài)試驗(yàn)分析,又稱試驗(yàn)?zāi)B(tài)分析法。在分析過程中,由試驗(yàn)測(cè)得激勵(lì)和響應(yīng)的時(shí)間過程,利用數(shù)字信號(hào)處理技術(shù)獲得頻響函數(shù)或脈沖函數(shù),通過曲線擬合獲得結(jié)構(gòu)的非參數(shù)模型,之后利用參數(shù)處理方法,求解出系統(tǒng)的模態(tài)參數(shù),從而建立系統(tǒng)的試驗(yàn)動(dòng)態(tài)模型。所以,試驗(yàn)?zāi)B(tài)分析是主要利用線性振動(dòng)理論、動(dòng)態(tài)測(cè)試技術(shù)、數(shù)字信號(hào)技術(shù)處理和參數(shù)識(shí)別等技術(shù),通過識(shí)別結(jié)構(gòu)系統(tǒng),對(duì)結(jié)構(gòu)整體進(jìn)行建模分析的一種試驗(yàn)建模方法[45-47]。
振動(dòng)系統(tǒng)包含三個(gè)要素:系統(tǒng)特性、激勵(lì)和響應(yīng)。通過激勵(lì)與響應(yīng),便可求出整體結(jié)構(gòu)系統(tǒng)的動(dòng)態(tài)特性[48]。可以把連續(xù)的機(jī)械結(jié)構(gòu)離散處理,將其變成具有一定自由度的子系統(tǒng),由第 2 章的理論可知,對(duì)于一個(gè)自由度為 n 的振動(dòng)子系統(tǒng),式(4.1)可以表示其動(dòng)態(tài)特性微分方程:
文25
式(4.3)描述了系統(tǒng)的輸入和輸出關(guān)系。再通過各種數(shù)據(jù)處理和數(shù)學(xué)分析方法,可識(shí)別系統(tǒng)的模態(tài)參數(shù),建立相應(yīng)的運(yùn)動(dòng)方程。利用試驗(yàn)分析結(jié)果分析系統(tǒng)在不同工作狀態(tài)下的特性,為設(shè)計(jì)提供試驗(yàn)依據(jù)。
4.2 激振方法簡(jiǎn)介
4.2.1 激振方法
試驗(yàn)?zāi)B(tài)分析中通常采用的激振方式主要有穩(wěn)態(tài)正弦激振、隨機(jī)激振和瞬態(tài)激振。
(1)穩(wěn)態(tài)正弦激勵(lì):采用頻率不同的一組正弦信號(hào),放大功率后通過激振器產(chǎn)生的激振力施加給機(jī)械結(jié)構(gòu)。其具有激振力大,能量集中,高信噪比和高測(cè)試精度等優(yōu)點(diǎn),但測(cè)試時(shí)間相對(duì)較長(zhǎng)。
(2)隨機(jī)激勵(lì):激勵(lì)信號(hào)通常選用白噪聲或偽隨機(jī)信號(hào)。其測(cè)試頻率范圍寬,試驗(yàn)效率很高。但是,在隨機(jī)信號(hào)的譜估計(jì)過程中不可避免存在原理性的隨機(jī)誤差,為了減小這種隨機(jī)誤差帶來(lái)的影響,通常平滑處理譜估計(jì),所以降低了試驗(yàn)精度,通常它的測(cè)試精度比正弦激勵(lì)的略低。
(3)瞬態(tài)激勵(lì):主要有正弦掃頻激振、脈沖激振和階躍激振等幾種激振方法,通常脈沖激振因其具備諸多優(yōu)點(diǎn)被廣泛采用。在脈沖激振過程中,激振力由實(shí)驗(yàn)員利用力錘敲擊實(shí)驗(yàn)對(duì)象測(cè)點(diǎn)產(chǎn)生。這種方法簡(jiǎn)單方便,節(jié)省操作時(shí)間,激振點(diǎn)選取靈活。但是,由于在試驗(yàn)操作中,力錘敲擊通常是人工控制的,敲擊力一致性較低,因此測(cè)試精度相對(duì)較低。同時(shí)脈沖激振的能量較小,只適用于結(jié)構(gòu)不太復(fù)雜的中小型結(jié)構(gòu)。
上述激振方法都是單點(diǎn)激振法。近年來(lái),多點(diǎn)隨機(jī)激振方式逐漸成熟,這種方法可將多個(gè)激振點(diǎn)同時(shí)布置在實(shí)驗(yàn)對(duì)象,從而避免單個(gè)激振點(diǎn)恰好布置在某階模態(tài)的節(jié)點(diǎn)而遺漏這一節(jié)點(diǎn)模態(tài)情況的識(shí)別,同時(shí)多點(diǎn)激振法的激振能量較大,測(cè)量精度較高。
4.2.2 錘擊法簡(jiǎn)介
錘擊法激振實(shí)驗(yàn)對(duì)象是當(dāng)前分析結(jié)構(gòu)的模態(tài)時(shí)廣泛應(yīng)用的一種試驗(yàn)方法,屬于脈沖激振法。錘擊法通過力錘敲擊實(shí)驗(yàn)對(duì)象從而獲得激振力,利用數(shù)據(jù)采集儀收集激勵(lì)信號(hào) F(t)和響應(yīng)信號(hào) (t),再將獲得的時(shí)域信號(hào)經(jīng)過 FFT 處理轉(zhuǎn)換為頻域信號(hào),從而獲得頻率響應(yīng)曲線,最后得到系統(tǒng)的動(dòng)態(tài)特性。
(t),再將獲得的時(shí)域信號(hào)經(jīng)過 FFT 處理轉(zhuǎn)換為頻域信號(hào),從而獲得頻率響應(yīng)曲線,最后得到系統(tǒng)的動(dòng)態(tài)特性。
錘擊法激振實(shí)驗(yàn)對(duì)象時(shí),設(shè)備簡(jiǎn)單,操作便利,敲擊點(diǎn)選擇具有很大靈活性,在試驗(yàn)時(shí)現(xiàn)場(chǎng)安裝試驗(yàn)設(shè)備即可,節(jié)省了大量時(shí)間,同時(shí)設(shè)備的傳感器較小,不會(huì)給實(shí)驗(yàn)對(duì)象帶來(lái)額外的質(zhì)量、剛度和阻尼影響,測(cè)試非常方便[49]。理論上力錘的每次激振時(shí)間趨近于零,激振力無(wú)窮大,它的頻譜圖為一條直線,如圖 4.1 所示。但現(xiàn)實(shí)條件下,由于力錘和實(shí)驗(yàn)對(duì)象的材料具有彈性特性,激振時(shí)間和激振力的情況會(huì)發(fā)生變化,它的激振力信號(hào)與頻譜圖如圖 4.2 所示,力譜的幅值在低頻處變化較小,可近似看成直線,隨著頻率增高幅值逐漸下降,激振能量逐漸較小。在試驗(yàn)時(shí)為了得到更加準(zhǔn)確的結(jié)果,可以多次敲擊激振,提高信噪比,同時(shí)應(yīng)避免力錘的重復(fù)激勵(lì)。
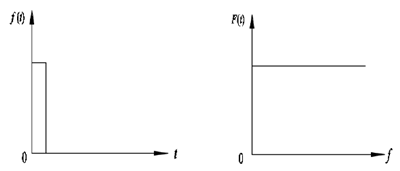
圖 4.1 理想脈沖信號(hào)與頻譜圖
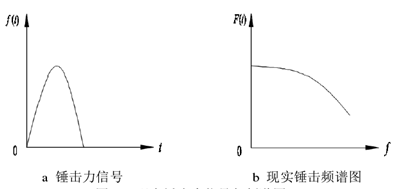
圖 4.2 現(xiàn)實(shí)錘擊力信號(hào)與頻譜圖
本文采用脈沖激振方法對(duì)主軸進(jìn)行激振,利用數(shù)據(jù)采集系統(tǒng)對(duì)激勵(lì)產(chǎn)生的振動(dòng)信號(hào)進(jìn)行采集,并對(duì)數(shù)據(jù)進(jìn)行處理,獲得主軸模態(tài)信息,指導(dǎo)主軸的動(dòng)態(tài)優(yōu)化設(shè)計(jì),整個(gè)過程如圖 4.3 所示。
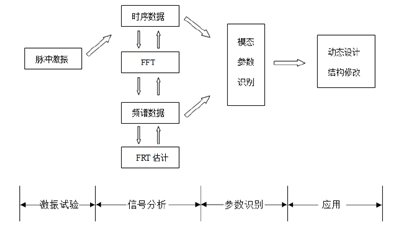
圖 4.3 試驗(yàn)?zāi)B(tài)分析過程
4.3 自由狀態(tài)下主軸的動(dòng)態(tài)試驗(yàn)
本文主軸部件的動(dòng)態(tài)試驗(yàn)包括兩部分,包括測(cè)量主軸在自由狀態(tài)下的固有頻率和振型,以及測(cè)量主軸在裝配條件下的固有頻率。通過試驗(yàn)獲得主軸的動(dòng)態(tài)特性與有限元分析結(jié)果進(jìn)行比對(duì),分析有限元分析存在問題并指導(dǎo)主軸的結(jié)構(gòu)改進(jìn)。下面進(jìn)行主軸在自由狀態(tài)下的動(dòng)態(tài)試驗(yàn)。
4.3.1 試驗(yàn)設(shè)備
在本動(dòng)態(tài)試驗(yàn)中,所用到設(shè)備如表 4.1 所示,同時(shí)車床主軸由于體積較大,質(zhì)量較高,測(cè)試力錘無(wú)法提供足夠激振能量,所以采用簡(jiǎn)單的鐵錘進(jìn)行敲擊,由于其不具有傳感器而無(wú)法收集激振力信號(hào),所以得到的參數(shù)值是相對(duì)的。
表 4.1 試驗(yàn)主要設(shè)備

4.3.2 試驗(yàn)方案
在本次試驗(yàn)中,目的是獲取主軸在自由狀態(tài)下的固有頻率及振型。為了獲取主軸的振型,需要測(cè)得主軸不同部位的振動(dòng)響應(yīng)情況。第 3 章在建模軟件中建立的主軸模型可知,主軸的軸向?yàn)?X 向,主軸的徑向截面處于 Y 向和 Z 向,在 Y 向和 Z 向每個(gè)方向各取 11 個(gè)測(cè)點(diǎn)測(cè)量主軸的動(dòng)態(tài)特性,并在主軸的中間部分激勵(lì)主軸,以便主軸整體能夠被充分激振。首先,對(duì)所有測(cè)點(diǎn)進(jìn)行振動(dòng)響應(yīng)情況測(cè)試,獲得主軸的振型。其次,改變測(cè)量參數(shù),同時(shí)選取主軸 2 點(diǎn)和 8 點(diǎn),測(cè)量主軸的固有頻率。在試驗(yàn)中,由于選擇鐵錘對(duì)主軸進(jìn)行激振,為了避免鐵錘沖擊主軸對(duì)其造成無(wú)法修復(fù)的破壞,特選取未加工的主軸件進(jìn)行激振試驗(yàn),經(jīng)測(cè)量,該主軸徑向平均尺寸比加工完成后的成品主軸徑向尺寸大 6mm,理論上對(duì)測(cè)量結(jié)果影響不大,所以選擇該主軸進(jìn)行激振試驗(yàn)。各測(cè)點(diǎn)的參數(shù)坐標(biāo)如表 4.2 所示,試驗(yàn)方案如圖 4.4 所示。
表 4.2 各測(cè)點(diǎn)坐標(biāo)參數(shù)
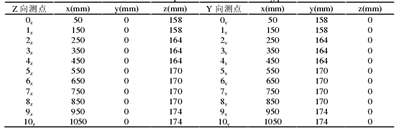
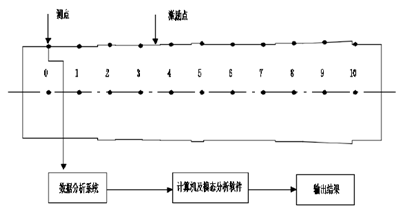
圖 4.4 主軸測(cè)試系統(tǒng)
4.3.3 試驗(yàn)過程
為了測(cè)試主軸自由狀態(tài)下的動(dòng)態(tài)特性,同時(shí)盡量減小周圍環(huán)境振動(dòng)和支撐剛度對(duì)測(cè)試結(jié)果的影響,將主軸在中間部位采用一根彈性繩吊起至距離地面 10cm 的位置,同時(shí)調(diào)整彈性繩位置,使主軸盡量保持水平,通過此方法,模擬主軸的自由狀態(tài)。該數(shù)據(jù)分析儀為多通道數(shù)據(jù)分析儀器,根據(jù)現(xiàn)有條件,在測(cè)試前檢查加速度計(jì)和調(diào)整數(shù)據(jù)分析儀為雙通道激振測(cè)試,只記錄響應(yīng)信號(hào)。每次測(cè)試中,兩個(gè)加速度計(jì)通過磁頭分別吸附在主軸同一徑向截面的 Y 向和 Z 向測(cè)點(diǎn)上,準(zhǔn)備測(cè)試,根據(jù)有限元分析主軸自由狀態(tài)下的一階固有頻率值設(shè)定數(shù)據(jù)分析儀的測(cè)試頻率范圍為 0 到 1500Hz,激勵(lì)點(diǎn)選在主軸中間位置,以便每次激勵(lì)能夠充分激振這各個(gè)測(cè)點(diǎn)。此外,為了使每次鐵錘敲擊力度盡量一致,利用帶有摩擦阻力的線繩吊住鐵錘,使其敲擊面與主軸面貼合,距離地面為固定位置,每次敲擊時(shí),拉動(dòng)其到固定位置,再松開鐵錘,使主軸受到鐵錘的水平激振力,這樣便得到了近似相同的激振力,試驗(yàn)情況如圖 4.5 所示。
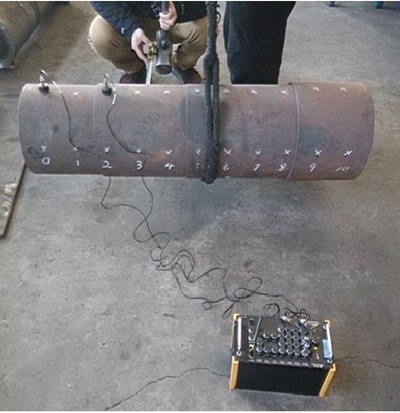
圖 4.5 主軸自由狀態(tài)下的動(dòng)態(tài)試驗(yàn)
再次改變數(shù)據(jù)分析儀測(cè)量參數(shù),同時(shí)測(cè)量主軸的 2 點(diǎn)和 8 點(diǎn) Y 向和 Z 向的固有頻率,計(jì)算兩點(diǎn)固有頻率的平均值即可代表主軸在自由狀態(tài)下的固有頻率。
4.3.4 試驗(yàn)結(jié)果
通過試驗(yàn),每次測(cè)得 2 測(cè)點(diǎn)與其他各個(gè)測(cè)點(diǎn)的最大位移變化情況如表 4.3 和表 4.4所示。
表 4.3 自由狀態(tài)下各點(diǎn) Y 向最大振動(dòng)位移
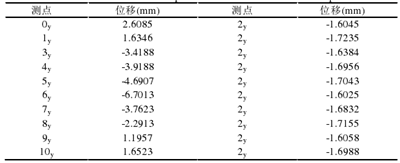
表 4.4 自由狀態(tài)下各點(diǎn) Z 向最大振動(dòng)位移
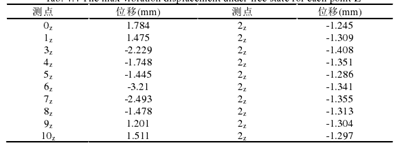
對(duì)上述試驗(yàn)所得結(jié)果進(jìn)行數(shù)據(jù)處理,將 2 測(cè)點(diǎn)的振動(dòng)位移看成 1mm,同時(shí)處理其他各測(cè)點(diǎn)振動(dòng)位移,經(jīng)過處理,可得主軸兩個(gè)方向的振型變化情況,如圖 4.6 和圖 4.7所示。
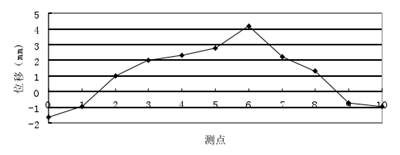
圖 4.6 測(cè)點(diǎn) Y 向一階振型圖
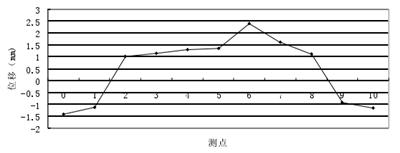
圖 4.7 測(cè)點(diǎn) Z 向一階振型圖
在自由狀態(tài)下測(cè)量主軸固有頻率中,對(duì) 2 點(diǎn)和 8 點(diǎn)進(jìn)行激振試驗(yàn),通過數(shù)據(jù)分析儀處理,獲得 2 點(diǎn)和 8 點(diǎn) Y 向和 Z 向的頻響函數(shù)曲線,圖 4.8 至圖 4.11 分別為兩測(cè)點(diǎn)的頻響函數(shù)曲線圖。
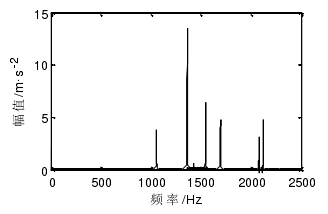
圖 4.8 2 點(diǎn) Z 向頻率響應(yīng)曲線
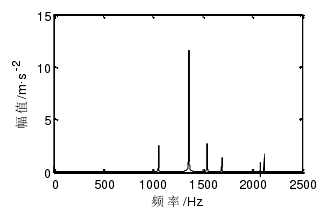
圖 4.9 2 點(diǎn) Y 向頻率響應(yīng)曲線
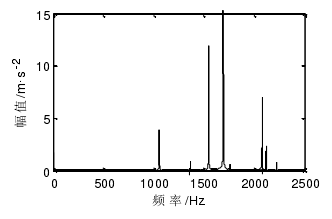
圖 4.10 8 點(diǎn) Z 向頻率響應(yīng)曲線
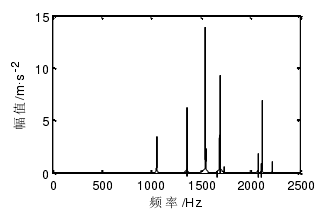
圖 4.11 8 點(diǎn) Y 向頻率響應(yīng)曲線
測(cè)得主軸 2 點(diǎn)和 8 點(diǎn)的固有頻率如表 4.5 所示。
表 4.5 自由狀態(tài)下測(cè)點(diǎn)前四階固有頻率

對(duì)上述兩點(diǎn)的前四階固有頻率取平均值,最后可得到主軸在自由狀態(tài)下通過試驗(yàn)分析獲得的前四階固有頻率值,見表 4.6。
表 4.6 自由狀態(tài)下主軸的前四階固有頻率
4.4 裝配狀態(tài)下主軸的動(dòng)態(tài)試驗(yàn)
在主裝配狀態(tài)下的動(dòng)態(tài)試驗(yàn)中,本文只測(cè)得主軸固有頻率,并通過測(cè)得結(jié)果與有限元分析結(jié)果進(jìn)行比對(duì)分析,指導(dǎo)利用有限元分析主軸的動(dòng)態(tài)特性。由于利用試驗(yàn)設(shè)備與上文相同,故不再介紹。
投稿箱:
如果您有機(jī)床行業(yè)、企業(yè)相關(guān)新聞稿件發(fā)表,或進(jìn)行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機(jī)床行業(yè)、企業(yè)相關(guān)新聞稿件發(fā)表,或進(jìn)行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
更多本專題新聞
名企推薦








