0 引言
小模數齒輪指m ≤1.0 mm的齒輪,廣泛用于航空、航天、雷達、儀器儀表等行業的精密機械傳動中;通常傳遞的載荷不大,但要求傳動誤差小,傳遞運動準確,對其傳動鏈的設計要求較高。傳動誤差主要由減速器的設計和制造質量決定,文中分析了傳動鏈設計中各環節對傳動誤差的影響,歸納出減小傳動誤差的措施,使在相同制造成本時的減速器傳動誤差最小。本文還對小模數齒輪在微電機減速機構中的傳動形式及其材料進行了分析。
對精密傳動鏈的主要要求是動態響應具有高精確度和高效能,因此,使齒輪傳動參數最佳與使單個齒輪特性最佳一樣重要。精密齒輪傳動鏈的主要研究內容包括:1)齒輪的誤差分析。其中包括齒輪材料、加工工藝和設備、最佳參數、齒輪修型。2)傳動鏈的精度分析。傳動精度的主要指標有空程和傳動誤差,其中包括空程和傳動誤差的計算方法,以及為使兩者達到最小傳動鏈參數的優化設計。3)測試手段。包括各種指標測試儀器的研制和測試方法的研究[1]。
1 傳動誤差分析
1.1 單個齒輪傳動誤差
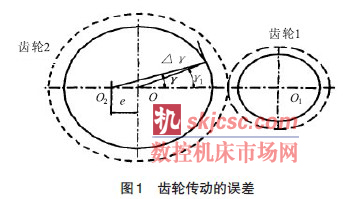
1)齒輪孔與軸配合間隙引起的傳動誤差。配合間隙造成齒輪運動偏心,相當于齒部漸開線的基圓產生了偏心,見圖1(虛線為分度圓,實線為基圓)。設主動齒輪1為精確齒輪,其中心為0 l,從動齒輪2基圓偏心e ,實際旋轉中心為0 2。當從動輪理論上轉過γ l,而基圓因偏心實際轉角為γ ,角誤差為:
△γ =γ 1-γ ≈e /R j sinγ . (1)
式中:Rj 為齒輪基圓半徑。
由于γ 服從均勻分布,由概率論可知△γ 服從反正弦分布。若從動輪實際轉角由γ l轉到γ 2,角誤差為:
△γ =e /Rj (sinγ 1-sinγ 2). (2)
由式(2)可知,在基圓上最大角誤差△γ max=2e /Rj .該誤差在基圓上產生的圓弧誤差m =△γ maxR j=2e ,相應反映在嚙合線上也產生誤差,由此得出在分度圓上的弧長誤差為l =2e/cosa ,其中a 為壓力角。若C表示配合間隙,最大角誤差為:
θ 1 m a x=L /R f =2e /R f cosα =4e /d cosα =2c /d cosα . (3)
將式(3)轉化為角度,單位為分,則有:
θ 1max=6.88c /mz cosα . (4)
式中:m 為模數;z 為齒數;
2)軸承跳動引起的傳動誤差。軸承徑向跳動ED相當于偏心量的兩倍,由此產生的最大角誤差
θ 2max= 6.88ED /mz cosα . (5)
3)單個齒輪制造誤差引起的傳動誤差。單個齒輪的制造誤差可由齒輪切向綜合公差Fi ,來衡量,其產生的最大角誤差
θ 3max=6.88F i /mz . (6)
1.2 輸出軸傳動誤差
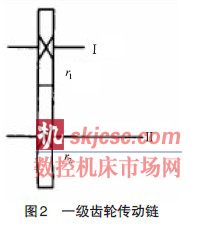
對圖2 的一級齒輪傳動鏈進行分析。假設齒輪1的綜合傳動誤差為Δ l,該誤差通過傳動鏈傳遞給軸Ⅱ,使其產生誤差δ 2,則有
δ 2=Δ lr 1 /r2=Δ l /i 1 2 . (7)
式中:r 1,r 2為齒輪1,2 的分度圓;i 12為傳動比。
若齒輪2的綜合傳動誤差為Δ 2,則軸Ⅱ的總傳動誤差為:
δ =Δ 2+δ 2=Δ 2+Δ l /i 1 2 . (8)
同理,可得到N 級傳動輸出軸的總傳動誤差:
δ =Δ l/i 1-(n +1)+ (Δ 2+Δ 3)/i 2-(n +1)+...+ (Δ (2n -2) +Δ (2n -1))/ in -(n +1)+Δ 2n. (9)
式中:Δ i為各個齒輪的綜合傳動誤差。
1.3 減小傳動誤差的措施
1) 由式(9)可得出如下結論,對減速傳動,越靠近輸出軸的齒輪副精度對傳動誤差影響越大,因此適當提高靠近輸出軸的齒輪副精度,可在相同成本的情況下減小整體傳動誤差;傳動鏈越長,效果越明顯。對增速傳動,則與減速傳動相反,提高靠近輸入軸的齒輪副精度,可減小傳動誤差。2) 無論是對減速傳動還是增速傳動,在條件允許的情況,減少傳動級數均可減小傳動誤差。3) 由式(8)可看出,傳動比i 在分母,因此,無論是減速傳動還是增速傳動,傳動比分配按先小后大的原則可減小傳動誤差,即減速器應在后幾級集中減速,增速器應在前幾級集中增速[2,3]。
2 空程的研究
空程的研究方法主要包括:靜態分析和動態分析。空程的靜態分析中,常用的方法是概率統計法和峰值法。空程的動態分析是從時域的觀點出發,建立系統分析函數,對空程進行定量、定性分析。由于目前國內還沒有空程的動態測試儀器,所以這種分析研究還不夠深入。
靜態分析法和動態分析法的問題各有不同。靜態分析法只能作誤差預測,而不能作為設計的標準。因為靜態未考慮諸如慣性,轉速等動態因素,它與實際情況有所差別;動態分析法只能提供系統穩定所允許的最大空程,而不能確定系統空程的確切大小。再者,動態空程目前還沒有合適的儀器進行直接測量。國內現有的測試手段是選用動態法測出的正、反傳動誤差,再將同一位置的兩傳動誤差相減而得到空程。這種間接方法僅僅在反向轉動的最初點能夠反映,所以此法所測空程還不是真實的動態空程。
通過上述分析,小模數齒輪傳動鏈的進一步研究有以下方面:1) 研制高性能,高可靠性,自動化的動態空程測試儀。這是對空程進行動態分析的必要條件。測試儀應有如下功能:計算機實時數據采集,數據處理,轉速測定,并有同步時間響應的功能。2) 建立空程的動態數學模型,將靜態模型在動力學的領域里加以完善,從動力學的角度去研究他。3) 齒輪傳動精度CAD 的軟件的開發與研究。其中優化目標和設計原則可選擇多目標,例如,尺寸最小,質量最輕,強度最大等。對于精密傳動來說,精度無疑是最重要的,所以優化必須是多目標的,其中主要目標為尺寸最小,精度最高(誤差最小),最經濟[4]。
3 小模數齒輪在微電機減速機構中的應用
小模數齒輪廣泛用在微電機的減速機構中,電機力矩的傳遞、轉速的改變,都是通過一系列齒輪傳動實現的,因此,小模數齒輪的設計,加工、裝配質量直接影響電機減速機構的性能,例如效率,精度,噪聲等指標。根據產品類型,小模數齒輪分別用在儀表電機,辦公用品電機,舞臺燈具電機等產品中。對于不同電機的減速系統,要求不同。在儀表電機中,其性能指標要求苛刻,靈敏度、傳動精度和噪聲指標尤其重要。在辦公用品電機中,齒輪減速系統要傳遞足夠大的力矩,對噪聲要求也高。對于舞臺燈具電機,齒輪系統除傳遞轉矩外,其工作可靠性尤其重要,所以,減速電機的生產中,不僅要注意電機本身的質量,還必須注重齒輪的設計、加工、裝配質量。
3.1 齒輪傳動形式的選擇
微電機采用的許多齒輪中,其齒輪傳動形式主要分為:直齒圓柱齒輪,斜齒圓柱齒輪,蝸桿蝸輪傳動。
1)直齒圓柱齒輪的特點為:結構簡單,加工和檢驗方便,加工精度范圍寬,傳動精度高,直齒圓柱齒輪的摩擦阻力矩小,效率高,可以逆轉,安裝方便;因此,這種齒輪傳動形式多用于儀表電機中,例如儀表同步電機,可逆電機,磁滯電機等。2)斜齒圓柱齒輪的特點為:除了螺旋角帶來的復雜性之外,它的性能與直齒圓柱齒輪相同,其結構簡單程度及加工和檢驗的方便程度均僅次于直齒圓柱齒輪;但斜齒圓柱齒輪傳動的重合度大,具有較高的工作平穩性和較小的噪聲。這類齒輪傳動形式多用于辦公用品電機中,例如復印機,傳真機中的主電機。3)蝸桿蝸輪傳動形式的特點為:可傳遞空間垂直相交軸的回轉運動,傳動比大,運轉平穩。當蝸桿升角小于輪齒間的當量摩擦角時,蝸桿蝸輪的傳動將具有自鎖性。從而使運轉不可逆,此時的傳動效率低于50%。這種傳動形式多用于汽車雨刮器電機和部分舞臺燈具電機中。
3.2 齒輪材料的選擇
用于微電機的齒輪材料通常分為:金屬材料和非金屬材料。不同的電機應選擇合適的齒輪材料,齒輪材料的選擇對電機的性能指標影響很大。例如:在儀表電機中,要求齒輪系統很高的靈敏度和傳動精度及低的噪聲指標,應選擇有一定強度,并有較好加工性的黃銅材料。在辦公用品電機中,由于工作環境的限制,使得電機的噪聲指標尤其重要,因此,在電機減速器的前兩級齒輪中采用非金屬材料,例如聚甲醛,增強ABS 等工程塑料,這些齒輪采用精密注塑工藝加工成圓柱齒輪,可有效降低齒輪的嚙合噪聲。但在后幾級傳動中,由于轉速變慢,傳遞轉矩增大,宜用金屬材料。微電機使用的齒輪,大多數是模數在1 mm 以下的小模數齒輪,不同類型的電機選用不同結構的齒輪。常使用的齒輪組件有軸齒輪、片齒輪、疊齒輪等。小模數齒輪傳動系統中,齒輪間的側隙、齒頂間隙均要求很小,所以,齒輪在安轉前必須嚴格清洗,存在毛刺的齒輪需將齒輪毛刺去掉。裝配與工件傳遞過程中,還要嚴防齒頂磕碰,以免造成齒輪和軸的變形。
4 結束語
隨著技術的不斷更新,小模數齒輪傳動更精準,實現的功能更強大,必將在電子產品中得到廣泛的應用。
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com








