


多臺(tái)銑床與柔性基礎(chǔ)耦合振動(dòng)主動(dòng)控制實(shí)驗(yàn)研究
2019-10-24 來(lái)源:華北理工大學(xué) 北京科技大學(xué) 作者:楚京 龍海洋 裴未遲 張碩 葉曉蒙
摘要:針對(duì)數(shù)控銑床安裝上樓時(shí)與樓板耦合振動(dòng)問(wèn)題展開(kāi)研究。為了建立符合研究的實(shí)驗(yàn)?zāi)P停紫炔捎茫硞€(gè)鑄鋼質(zhì)量塊模擬3臺(tái)銑床,用四邊簡(jiǎn)支柔性板模擬柔性基礎(chǔ);然后利用 Lab VIEW 圖形化編程軟件對(duì)基本流程進(jìn)行程序設(shè)計(jì),建立實(shí)驗(yàn)的軟件系統(tǒng),進(jìn)而實(shí)現(xiàn)不同參數(shù)下的振動(dòng)控制;最后運(yùn)用最優(yōu)控制方法進(jìn)行控制系統(tǒng)的設(shè)計(jì)。實(shí)驗(yàn)結(jié)果表明:應(yīng)用壓電陶瓷作動(dòng)器對(duì)實(shí)驗(yàn)系統(tǒng)實(shí)施振動(dòng)主動(dòng)控制的方案可行,且效果明顯。多點(diǎn)激勵(lì)的振動(dòng)實(shí)驗(yàn)不僅控制效果良好,同時(shí)也應(yīng)該是當(dāng)今振動(dòng)實(shí)驗(yàn)技術(shù)的發(fā)展方向。
關(guān)鍵詞:主動(dòng)控制;柔性基礎(chǔ);銑床;耦合
隨著數(shù)控銑床的廣泛應(yīng)用,以及多層廠房的不斷興建,械設(shè)備安裝上樓成為發(fā)展趨勢(shì),從而導(dǎo)致數(shù)控銑床與樓板耦合振動(dòng)問(wèn)題日益突出。很多機(jī)械設(shè)備在操作、運(yùn)輸以及維護(hù)維修時(shí)都會(huì)產(chǎn)生振動(dòng),且產(chǎn)生的振動(dòng)并不是單一的,是比較復(fù)雜的振動(dòng)。
以前所進(jìn)行的實(shí)驗(yàn)研究都是針對(duì)單一的振動(dòng),很多問(wèn)題不能解決,有一定的局限性,因?yàn)闆](méi)有考慮各機(jī)械設(shè)備之間的振源耦合特性和動(dòng)態(tài)耦合作用。故本文模擬系統(tǒng)結(jié)構(gòu)在真實(shí)情況下的振動(dòng),進(jìn)行多點(diǎn)激勵(lì)的振動(dòng)實(shí)驗(yàn)及其仿真研究 。
1 、主動(dòng)隔振實(shí)驗(yàn)系統(tǒng)設(shè)計(jì)
1.1 實(shí)驗(yàn)臺(tái)搭建與實(shí)驗(yàn)原理
本文搭建的主動(dòng)隔振實(shí)驗(yàn)系統(tǒng)如圖1所示,主動(dòng)隔振實(shí)驗(yàn)原理如圖2所示。
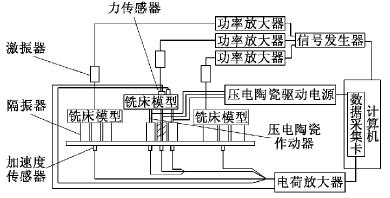
圖1 主動(dòng)隔振實(shí)驗(yàn)系統(tǒng)
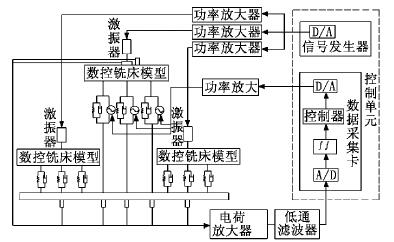
圖2 主動(dòng)隔振實(shí)驗(yàn)原理
在所建立的實(shí)驗(yàn)臺(tái)中,有兩套激勵(lì)振動(dòng)系統(tǒng),第一套激勵(lì)振動(dòng)系統(tǒng)產(chǎn)生符合機(jī)構(gòu)振動(dòng)情況的振動(dòng),應(yīng)用于激勵(lì)銑床模型;另一套激勵(lì)振動(dòng)系統(tǒng)用于驅(qū)動(dòng)作動(dòng)器抑制柔性基礎(chǔ)運(yùn)動(dòng)。
主動(dòng)隔振實(shí)驗(yàn)原理如下:信號(hào)發(fā)生器發(fā)出的信號(hào)經(jīng)過(guò)功率放大器后傳輸?shù)郊ふ衿魃希缓髮⑵浒l(fā)出的激勵(lì)經(jīng)過(guò)一系列元件加載到薄板上,薄板上的傳感器將信號(hào)傳輸?shù)诫姾煞糯笃?/font>,經(jīng)過(guò)電荷放大器放大的信號(hào)再通過(guò)濾波器濾波,然后收集到數(shù)據(jù)采集系統(tǒng);轉(zhuǎn)換的數(shù)字信號(hào)通過(guò)最優(yōu)控制器的邏輯分析將信號(hào)轉(zhuǎn)換成模擬電信號(hào),然后通過(guò)功率放大器的放大作用使作動(dòng)器做出相匹配的運(yùn)動(dòng),使計(jì)算機(jī)得出一些數(shù)據(jù)結(jié)果,最后再按照最優(yōu)控制準(zhǔn)則來(lái)調(diào)節(jié)作動(dòng)器的動(dòng)作,從而就可以抑制數(shù)控銑床的振動(dòng)。
1.2 實(shí)驗(yàn)?zāi)P偷脑O(shè)計(jì)與制作
為驗(yàn)證仿真模型的可靠性,進(jìn)行柔性隔振系統(tǒng)的模型實(shí)驗(yàn)。實(shí)驗(yàn)系統(tǒng)模型如圖3所示,采用3個(gè)鑄鋼質(zhì)量塊模擬3臺(tái)銑床,用四邊簡(jiǎn)支柔性板模擬柔性基礎(chǔ),3臺(tái)機(jī)床模型通過(guò)隔振系統(tǒng)安裝在四端簡(jiǎn)支的矩形板上,在每臺(tái)機(jī)床上均安裝一個(gè)激振器使其振動(dòng)。由于實(shí)驗(yàn)條件的限制,本文僅在第二臺(tái)機(jī)床下安裝3組主被動(dòng)一體隔振器,其中主動(dòng)隔振器與被動(dòng)隔振器并聯(lián),第一臺(tái)和第三臺(tái)機(jī)床下均安裝3組被動(dòng)隔振器。主動(dòng)隔振實(shí)驗(yàn)系統(tǒng)簡(jiǎn)化模型如圖4所示。
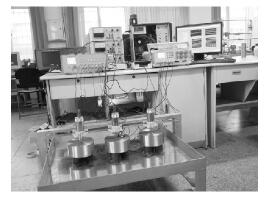
圖3 實(shí)驗(yàn)系統(tǒng)模型
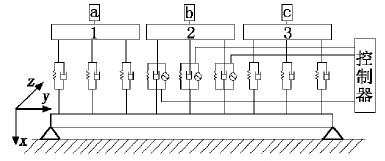
圖4 主動(dòng)隔振實(shí)驗(yàn)系統(tǒng)簡(jiǎn)化模型
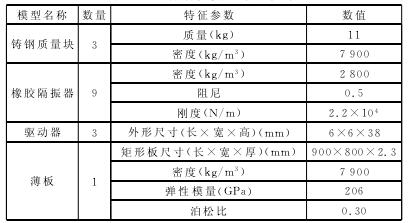
本實(shí)驗(yàn)用模型來(lái)模擬實(shí)際原件,原型尺寸與質(zhì)量上的比例關(guān)系符合實(shí)際原件實(shí)驗(yàn)?zāi)P汀V鲃?dòng)隔振實(shí)驗(yàn)系統(tǒng)參數(shù)見(jiàn)表1。
表1 主動(dòng)隔振實(shí)驗(yàn)系統(tǒng)參
2 、實(shí)驗(yàn)多通道控制耦合特性描述
因?yàn)橥ǖ乐g會(huì)有耦合作用,所以在對(duì)實(shí)驗(yàn)進(jìn)行多通道控制的過(guò)程當(dāng)中需要對(duì)多個(gè)點(diǎn)進(jìn)行控制,取其中一點(diǎn)c進(jìn)行研究,其振動(dòng)響應(yīng)方程為:

當(dāng)d 和d+1兩點(diǎn)的振動(dòng)控制力在c點(diǎn)的作用相互抵消時(shí),c點(diǎn)所受的力就會(huì)削弱,所以在主動(dòng)控制作用中應(yīng)考慮通道之間的耦合作用。
3 、數(shù)據(jù)采集及輸出控制系統(tǒng)
實(shí)驗(yàn)的控制系統(tǒng)是由采集控制硬件和軟件構(gòu)成,通過(guò)輸出控制程序獲取主動(dòng)控制前、后柔性板振動(dòng)狀態(tài)的數(shù)據(jù),將數(shù)據(jù)進(jìn)行對(duì)比分析來(lái)驗(yàn)證控制方法的正確性。
實(shí)驗(yàn)過(guò)程中,模擬信號(hào)采集、信號(hào)調(diào)理、線性二次型最優(yōu)控制器以及模擬信號(hào)輸出等多個(gè)模塊也是由Lab VIEW 軟件進(jìn) 行 編寫(xiě)。控制系統(tǒng)界面如圖 5 所示,主動(dòng)控制程序代碼顯示界面如圖6所示。
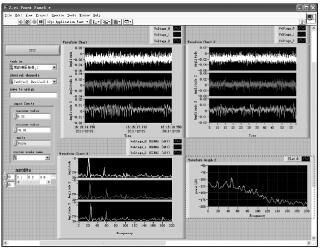
圖5 控制系統(tǒng)界面
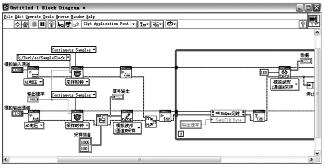
圖6 主動(dòng)控制程序代碼顯示界面
圖5中,控制面板顯示了頻域內(nèi)柔性基礎(chǔ)的振動(dòng)響應(yīng)、作動(dòng)器的輸出電壓以及時(shí)域內(nèi)作動(dòng)器對(duì)應(yīng)處柔性基礎(chǔ)的振動(dòng)狀態(tài)。
4 、仿真與實(shí)驗(yàn)結(jié)果分析
控制前功率流仿真曲線和實(shí)驗(yàn)曲線對(duì)比如圖7所示,控制前、后功率流仿真曲線對(duì)比如圖8所示。
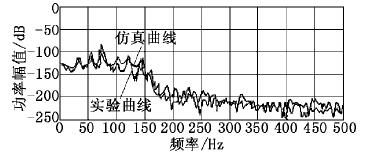
圖7 控制前功率流仿真曲線和實(shí)驗(yàn)曲線對(duì)比
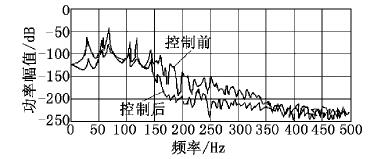
圖8 控制前、后功率流仿真曲線對(duì)比
由圖7可以看出:功率流傳遞曲線有走向平穩(wěn)的趨勢(shì),但是在反共振區(qū)域(150 Hz~300Hz)和別的地方不太一樣,傳遞到基礎(chǔ)上的功率流有所增加。由圖8中可以看出:中、低頻段作動(dòng)力對(duì)振動(dòng)控制的影響很大,功率流的傳遞效率明顯下滑,但在高頻段明顯與低頻段有所不同,主動(dòng)控制力的影響逐漸下滑甚至消失(在圖中表示為控制前、后的曲線重疊),說(shuō)明主動(dòng)控制力對(duì)中低頻的振動(dòng)控制具有良好效果,在高頻段幾乎沒(méi)有起到控制作用。加入控制后,在輸入隨機(jī)干擾信號(hào)的情況下,隔振系統(tǒng)位移仿真曲線與實(shí)驗(yàn)曲線如圖 9 和圖 10 所示。
在輸入正弦干擾信號(hào)下,隔振系統(tǒng)位移仿真曲線與實(shí)驗(yàn)曲線如圖11和圖12所示。通過(guò)對(duì)比圖9與圖10發(fā)現(xiàn):實(shí)驗(yàn)結(jié)果和仿真雖有一定誤差,但測(cè)試值和仿真值基本一致。
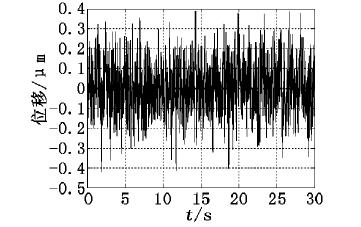
圖9 隨機(jī)干擾信號(hào)下隔振系統(tǒng)位移仿真曲線
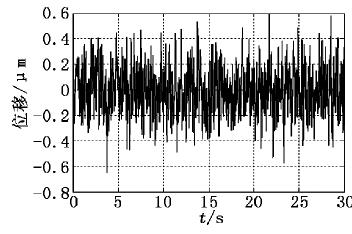
圖10 隨機(jī)干擾信號(hào)下隔振系統(tǒng)位移實(shí)驗(yàn)曲線
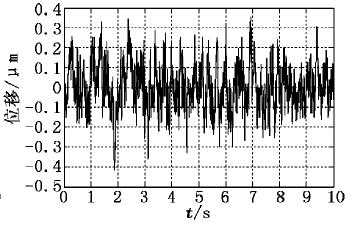
圖11 正弦干擾信號(hào)下隔振系統(tǒng)位移仿真曲線
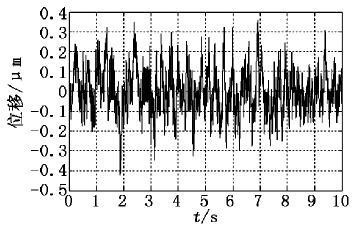
圖12 正弦干擾信號(hào)下隔振系統(tǒng)位移實(shí)驗(yàn)曲線
5 、結(jié)語(yǔ)
本文從實(shí)驗(yàn)的角度模擬了多臺(tái)銑床柔性基礎(chǔ)耦合振動(dòng)控制。在實(shí)驗(yàn)研究的過(guò)程當(dāng)中,主動(dòng)控制的方法對(duì)于控制系統(tǒng)的振動(dòng)是很有效的,減少了由機(jī)床傳遞至基礎(chǔ)板的能量。通過(guò)實(shí)驗(yàn)數(shù)據(jù)和仿真數(shù)據(jù)波形的對(duì)比分析,雖然兩者有一定的誤差,但整體來(lái)看,控制過(guò)程還是比較穩(wěn)定的。采用最優(yōu)控制的線性二次型性能指標(biāo)尋求最優(yōu)控制力,在中、低頻段的振動(dòng)中,LQR線性二次型控制器對(duì)于控制實(shí)驗(yàn)系統(tǒng)中的振動(dòng)是很有效的,但在高頻段振動(dòng)中并不是很實(shí)用,因?yàn)?LQR 線性二次型控制器對(duì)控制高頻段振動(dòng)信號(hào)作用不大。
投稿箱:
如果您有機(jī)床行業(yè)、企業(yè)相關(guān)新聞稿件發(fā)表,或進(jìn)行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機(jī)床行業(yè)、企業(yè)相關(guān)新聞稿件發(fā)表,或進(jìn)行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
更多相關(guān)信息

業(yè)界視點(diǎn)
| 更多
查")
行業(yè)數(shù)據(jù)
| 更多
- 2025年1月 新能源汽車(chē)銷(xiāo)量情況
- 2024年12月 新能源汽車(chē)產(chǎn)量數(shù)據(jù)
- 2024年12月 基本型乘用車(chē)(轎車(chē))產(chǎn)量數(shù)據(jù)
- 2024年12月 軸承出口情況
- 2024年12月 分地區(qū)金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2024年12月 金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2024年11月 金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2024年11月 分地區(qū)金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2024年11月 軸承出口情況
- 2024年11月 基本型乘用車(chē)(轎車(chē))產(chǎn)量數(shù)據(jù)
- 2024年11月 新能源汽車(chē)產(chǎn)量數(shù)據(jù)
- 2024年11月 新能源汽車(chē)銷(xiāo)量情況
- 2024年10月 新能源汽車(chē)產(chǎn)量數(shù)據(jù)
博文選萃
| 更多
- 機(jī)械加工過(guò)程圖示
- 判斷一臺(tái)加工中心精度的幾種辦法
- 中走絲線切割機(jī)床的發(fā)展趨勢(shì)
- 國(guó)產(chǎn)數(shù)控系統(tǒng)和數(shù)控機(jī)床何去何從?
- 中國(guó)的技術(shù)工人都去哪里了?
- 機(jī)械老板做了十多年,為何還是小作坊?
- 機(jī)械行業(yè)最新自殺性營(yíng)銷(xiāo),害人害己!不倒閉才
- 制造業(yè)大逃亡
- 智能時(shí)代,少談點(diǎn)智造,多談點(diǎn)制造
- 現(xiàn)實(shí)面前,國(guó)人沉默。制造業(yè)的騰飛,要從機(jī)床
- 一文搞懂?dāng)?shù)控車(chē)床加工刀具補(bǔ)償功能
- 車(chē)床鉆孔攻螺紋加工方法及工裝設(shè)計(jì)
- 傳統(tǒng)鉆削與螺旋銑孔加工工藝的區(qū)別