


車床主軸與進(jìn)給軸耦合熱誤差建模及補(bǔ)償研究
2015-11-23 來源:數(shù)控機(jī)床市場網(wǎng) 作者:西安交通大學(xué)機(jī)械制造系統(tǒng)孫志超陶濤黃曉勇
孫志超,陶濤,黃曉勇,梅雪松,王新孟,楊軍,趙亮
(西安交通大學(xué)機(jī)械制造系統(tǒng)工程國家重點(diǎn)實(shí)驗(yàn)室,710049,西安)
摘要:針對(duì)車床實(shí)際加工中主軸與進(jìn)給軸的熱誤差相互耦合共同影響工件精度的問題,建立了綜合熱誤差模型,并進(jìn)行了有效補(bǔ)償。以海德曼 HTC500/500 精密車床為研究對(duì)象,對(duì)車床主軸與進(jìn)給軸熱誤差的耦合關(guān)系進(jìn)行了解耦。利用模糊聚類理論實(shí)現(xiàn)了車床測溫點(diǎn)的優(yōu)化分組,建立了主軸與進(jìn)給軸的耦合熱誤差多元線性回歸模型,并在精密車床上得到實(shí)際應(yīng)用。結(jié)果表明:車床耦合熱誤差模型符合實(shí)際工況,模糊聚類有效降低了溫度變量之間的多重共線性,提高了模型的預(yù)測精度;主軸x/z方向熱誤差模型預(yù)測精度達(dá)88.4%、90.7%, x/z軸熱誤差模型預(yù)測精度達(dá)82.9%、71.3%;補(bǔ)償后車床 x/z 方向精度分別提高了60.3%和 56.6%,證明耦合熱誤差模型的準(zhǔn)確性。
關(guān)鍵詞:熱誤差解耦;熱誤差建模;模糊聚類分析;誤差補(bǔ)償
機(jī)床熱誤差嚴(yán)重制約著精密和超精密加工行業(yè)的發(fā)展,熱誤差占據(jù)了機(jī)床總誤差的 70%,對(duì)機(jī)床的加工精度影響最大。目前,消除熱誤差主要有兩種方法:熱誤差預(yù)防法和熱誤差補(bǔ)償法。近年來,對(duì)機(jī)床熱誤差方向的研究越來越多,相關(guān)方面的理論也越來越多,產(chǎn)生了很多有價(jià)值的科研成果。Donmez 認(rèn)為變化的溫度是機(jī)床產(chǎn)生熱變形,是機(jī)床的主要誤差源,機(jī)床越精密受其影響越大;Mou 認(rèn)為機(jī)床的熱特性是由于熱源位置、機(jī)床材料及強(qiáng)度、機(jī)床結(jié)構(gòu)等多種因素共同作用相互耦合作用的結(jié)果;Min 等人提出了基于傅里葉熱力學(xué)方程為基礎(chǔ)的熱態(tài)模型,分析不同邊界條件下絲杠溫度場的分布特性,對(duì)研究機(jī)床進(jìn)給軸熱誤差特性打下一定的基礎(chǔ)。相關(guān)理論的增多也伴隨著機(jī)床熱誤差建模方法的增多,Yang等人利用神經(jīng)網(wǎng)絡(luò)技術(shù)建立了主軸熱誤差與溫度之間的關(guān)系模型;楊軍等人利用模糊聚類優(yōu)化溫度測點(diǎn),并結(jié)合最小二乘支持向量機(jī)和神經(jīng)網(wǎng)絡(luò)技術(shù),構(gòu)建了精密坐標(biāo)鏜床主軸的熱誤差模型,取得了良好的預(yù)測效果;Wu 等人利用有限元仿真技術(shù),建立了絲杠預(yù)緊力和進(jìn)給速度與絲杠溫度場和熱變形的關(guān)系模型,并通過試驗(yàn)驗(yàn)證模型的有效性;Lin 等人利用最小二乘支持向量機(jī)理論建立了主軸熱誤差與溫度變化的相關(guān)關(guān)系;郭前建等人結(jié)合聚類分析理論建立了滾齒機(jī)熱誤差的多元線性回歸模型,提高了熱誤差模型的預(yù)測精度。Chao 等人利用 BP 神經(jīng)網(wǎng)絡(luò)模型和基于反饋線性自回歸滑動(dòng)平均的小波元神經(jīng)網(wǎng)絡(luò)模型建立了數(shù)控機(jī)床進(jìn)給系統(tǒng)在不同工況下溫度場分布和熱變形的數(shù)學(xué)模型;謝春等人利用 BP 神經(jīng)網(wǎng)絡(luò)算法建立了五軸車銑復(fù)合加工中心進(jìn)給軸的綜合熱誤差模型,并做了相關(guān)實(shí)驗(yàn)驗(yàn)證;Abdulshahed 等人提出了一種改進(jìn)的自適應(yīng)模糊推理系統(tǒng)(ANFIS),建立機(jī)床主軸的熱誤差預(yù)測模型,提高了預(yù)測精度;苗恩銘等人建立了數(shù)控加工中心主軸的支持向量回歸機(jī)模型,并在不同的環(huán)境溫度下驗(yàn)證模型的準(zhǔn)確性,均取得了良好的預(yù)測效果。
當(dāng)前文獻(xiàn)主要針對(duì)機(jī)床的主軸和進(jìn)給軸單個(gè)系統(tǒng)分別進(jìn)行建模及補(bǔ)償,而實(shí)際加工中主軸與進(jìn)給軸的熱誤差是并行存在,共同影響工件的加工精度。單個(gè)系統(tǒng)獨(dú)立補(bǔ)償與實(shí)際不符,而將兩者的熱誤差結(jié)合在一起的研究非常少。本文針對(duì)機(jī)床主軸與進(jìn)給軸熱誤差的耦合問題,進(jìn)行了解耦分析,建立了耦合熱誤差模型;并以海德曼HTC550/500 車床為研究對(duì)象,進(jìn)行了補(bǔ)償應(yīng)用,驗(yàn)證了耦合熱誤差模型的有效性及魯棒性。
1 Siemens 系統(tǒng)熱誤差補(bǔ)償方法
1.1 Siemens 熱誤差補(bǔ)償方式
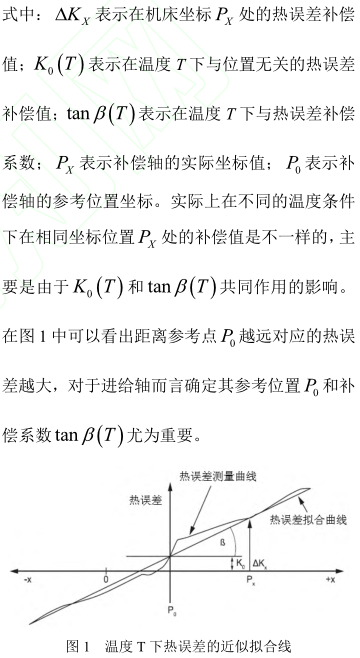
為了適應(yīng)市場需求,西門子為用戶提供了熱誤差補(bǔ)償?shù)慕涌冢┯脩糇远x熱誤差補(bǔ)償?shù)男问郊澳P蛥?shù)。西門子認(rèn)為金屬受熱膨脹與溫度之間是線性關(guān)系,主軸的熱誤差模型只與溫度有關(guān),與坐標(biāo)位置無關(guān);進(jìn)給軸的熱誤差模型則與溫度和坐標(biāo)位置都相關(guān)。西門子開放的熱誤差補(bǔ)償方式如圖 1 所示。
1.2 主軸與進(jìn)給軸熱誤差解耦
機(jī)床的熱誤差最終反映在刀具與工件相對(duì)位置的偏離,從而導(dǎo)致機(jī)床的加工精度降低,廢品率升高造成生產(chǎn)成本的提高。熱誤差補(bǔ)償?shù)哪康木驮谟谙蛘邷p小由于金屬熱膨脹而導(dǎo)致的機(jī)床刀具與工件之間的位置偏離,從而提高機(jī)床的加工精度。刀具與工件之間位置的偏離本質(zhì)上是由于主軸與進(jìn)給軸熱誤差相互耦合共同作用的結(jié)果,因此尋找主軸與進(jìn)給軸之間的耦合關(guān)系對(duì)于熱誤差模型的建立至關(guān)重要。為了能夠得到準(zhǔn)確的熱誤差數(shù)學(xué)模型, 就需要對(duì)兩者之間進(jìn)行解耦,分別得到各自的數(shù)學(xué)模型,再將模型根據(jù)耦合關(guān)系耦合在一起,便得到了機(jī)床總體的熱誤差數(shù)學(xué)模型。
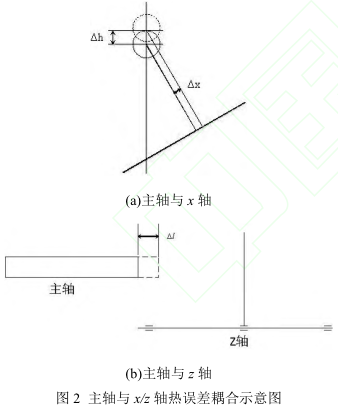
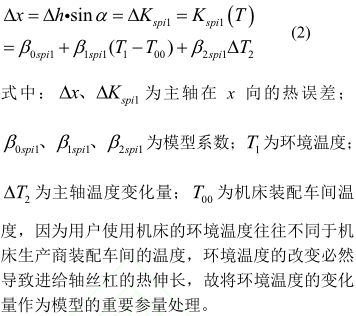
進(jìn)給軸在進(jìn)給狀態(tài)下絲杠螺母副由于摩擦產(chǎn)生熱量,絲杠溫度升高,伴隨著熱伸長。此車床是半閉環(huán)系統(tǒng),絲杠的伸長導(dǎo)致進(jìn)給軸熱誤差的產(chǎn)生。主軸在高速狀態(tài)下旋轉(zhuǎn)時(shí),前端軸承與后端軸承由于摩擦產(chǎn)生一定的熱量,熱量傳遞到主軸,主軸受熱就會(huì)產(chǎn)生熱變形,導(dǎo)致熱誤差的產(chǎn)生。主軸熱伸長 l的方向 z 軸相同,而主軸熱升高 h則會(huì)在 x 軸方向產(chǎn)生分量 x。只有分別分析主軸和進(jìn)給軸的熱誤差,分別建立相應(yīng)的數(shù)學(xué)模型,才能準(zhǔn)確全面的反映車床在 x、z 方向產(chǎn)生的熱誤差。主軸與進(jìn)給軸的熱誤差耦合示意圖如圖 2 所示。
車床主軸只有旋轉(zhuǎn)一個(gè)運(yùn)動(dòng)狀態(tài),不存在坐標(biāo)位置的變換,故主軸的熱誤差只與自身溫度變化相關(guān),熱誤差模型與位置無關(guān)。環(huán)境溫度的改變,以及主軸由于旋轉(zhuǎn)造成自身溫度的提高,不僅會(huì)影響主軸的熱伸長,同樣會(huì)造成主軸在垂直方向的變化。主軸在垂直方向位置的變化主要是由于主軸箱體受熱膨脹導(dǎo)致主軸整體升高,受環(huán)境溫度影響較大,主軸在 x 方向的熱誤差多元線性回歸模型可以表示為
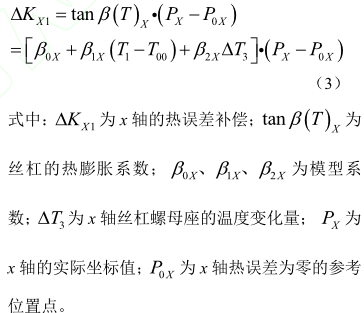
x 軸的熱誤差主要是由 x 軸絲杠的熱伸長引起的,絲杠的固定方式為一端固定一端游動(dòng),靠近電機(jī)端為固定端,遠(yuǎn)離電機(jī)端為游動(dòng)端,當(dāng) x軸絲杠受熱時(shí)會(huì)向游動(dòng)端伸長,固定端位置不會(huì)發(fā)生變化,可以作為熱誤差為零的參考點(diǎn)。x 軸熱誤差與位置和溫度相關(guān),選定參考點(diǎn),x 軸的熱誤差多元線性回歸模型可以表示為
以上將機(jī)床 x 方向的熱誤差分別解耦到主軸和 x 軸各自的熱誤差,并分別建立了各自的熱誤差模型。解耦是將復(fù)雜問題簡單化,解耦之后還需要解耦后的結(jié)果重新進(jìn)行耦合。x 軸為傾斜式安裝,如圖 2a 所示,機(jī)床 x 方向熱誤差的耦合模型為
同理,主軸的熱伸長與 z 軸方向相同,熱誤差多元線性回歸模型可以表示為

2 熱特性實(shí)驗(yàn)及結(jié)果分析
2.1 實(shí)驗(yàn)設(shè)計(jì)及測量原理
以浙江海德曼機(jī)床有限責(zé)任公司生產(chǎn)的HTC550/500 車床為研究對(duì)象,分析車床 x、z 方向熱誤差與溫度變量的關(guān)系。車床 x 和 z 方向的最大有效行程分別為 180 mm 和 520 mm,最高進(jìn)給速度分別為 30 m/min 和 36 m/min。
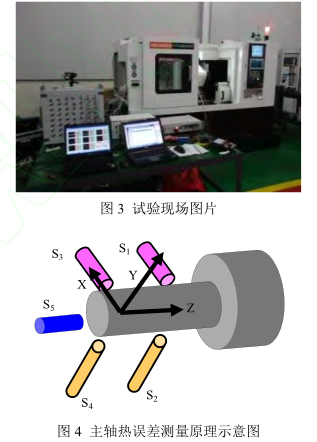
測試設(shè)備如下: RENISHAW 激光干涉儀用于測量進(jìn)給軸熱誤差值;溫度位移同步采集系統(tǒng)獲得溫度值及主軸熱誤差值;選用高精度溫度傳感器 PT100、高精度電渦流位移傳感器。溫度傳感器 PT100 記為:T1…T17,T1~T8安裝在主軸箱前端、后端和中部,T9z 軸電機(jī),T10z 軸前軸承,T11z 軸后軸承,T12z 軸螺母座,T13x 軸電機(jī),T14x 軸前軸承,T15x 軸后軸承,T16x 軸螺母座,T17 環(huán)境溫度;位移傳感器記為:S1,…,S5。試驗(yàn)現(xiàn)場和主軸測量原理如圖 3、圖 4 所示。 以機(jī)床主軸、x/z 軸的熱誤差為研究對(duì)象,主軸的熱誤差測量采用五點(diǎn)法測量,如圖 4 所示。主軸的熱伸長有 S5測量獲得,x 方向的熱誤差由S1和 S3測量獲得,y 方向的熱誤差由 S2和 S4測量獲得。由于轉(zhuǎn)速不同,主軸的熱變形略有不同,實(shí)驗(yàn)中設(shè)計(jì)了 1 000、1 500、2 000 r/min 3 種不同的轉(zhuǎn)速。 z 軸熱誤差由激光干涉儀進(jìn)行測量,測量范圍為[-495,0],各測量點(diǎn)間距為 45 mm,共 12個(gè)測點(diǎn)。z 軸坐標(biāo) 0 處作為激光干涉儀測量原點(diǎn)。x 軸的熱誤差測量范圍為[-165,0],各測點(diǎn)間距為15 mm,共 12 個(gè)測點(diǎn),0 處作為激光干涉儀測量原點(diǎn)。試驗(yàn)初始時(shí),在冷態(tài)下測量進(jìn)給軸各測點(diǎn)誤差,作為進(jìn)給系統(tǒng)的幾何誤差,進(jìn)給系統(tǒng)連續(xù)往復(fù)運(yùn)動(dòng) 30 min 后測量各測點(diǎn)的誤差值,此誤差值減去幾何誤差作為此刻進(jìn)給系統(tǒng)的熱誤差。依據(jù) VDI/ISO 標(biāo)準(zhǔn),每次重復(fù)測量 3 個(gè)循環(huán),每個(gè)測點(diǎn)測量 2 s,進(jìn)給系統(tǒng)暫停 4 s,為防止反向間隙對(duì)端點(diǎn)出熱誤差產(chǎn)生影響,取反向越程 5 mm。由于進(jìn)給速度不同,進(jìn)給系統(tǒng)的熱變形略有不同,實(shí)驗(yàn)設(shè)計(jì)了 500 mm/min、1 000 mm/min、1 500 mm/min。
2.2 結(jié)果分析
2.2.1 溫度場時(shí)域分析
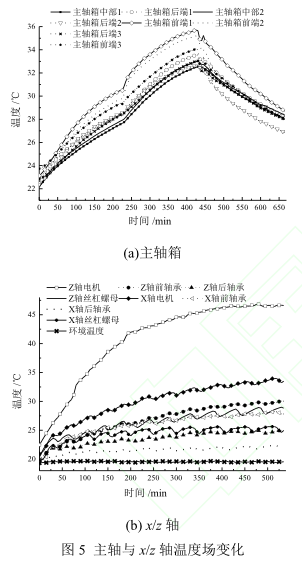
當(dāng)主軸旋轉(zhuǎn)進(jìn)給軸不動(dòng)時(shí),主軸箱的溫度變化如圖 5a 所示。主軸箱前端最高溫度達(dá) 36℃,最大溫差大約 13℃;主軸箱后端最高溫度達(dá) 34℃,最大溫度差 12℃;主軸箱中部最高溫度達(dá) 33℃,最大溫差 11℃。由主軸的結(jié)構(gòu)可知主軸前端有一個(gè)圓柱滾子軸承和兩個(gè)角接觸球軸承,后端一個(gè)圓柱滾子軸承,主軸箱內(nèi)部有空隙。主軸箱前端生熱較多,后端生熱較少,所以主軸箱的溫度場分布如圖 5a 所示,前端溫度高于后端,中部溫度最低。
當(dāng) z 軸進(jìn)給主軸不動(dòng)時(shí),z 軸絲杠螺母座與電機(jī)端軸承的溫度變化如圖 5b 所示。由于絲杠為轉(zhuǎn)動(dòng)體,無法用 PT100 直接測量絲杠的溫度,因此改為測量絲杠螺母座和電機(jī)端軸承座的溫度來間接反映絲杠的溫度變化,這是由于絲杠溫度的變化是由軸承及絲杠與螺母之間相對(duì)轉(zhuǎn)動(dòng)產(chǎn)生摩擦而發(fā)熱,引起溫度的變化。因此,由螺母座和電機(jī)端軸承的溫度來間接反映絲杠的溫度變化是合理的。同理,當(dāng) x 軸進(jìn)給時(shí)機(jī)床其他部分靜止,x軸絲杠螺母座與電機(jī)端軸承的溫度變化如圖 5b所示。
2.2.2 主軸熱變形分析
主軸的內(nèi)部結(jié)構(gòu)如圖 6a 所示,由圖可看出皮帶輪帶動(dòng)整個(gè)主軸系統(tǒng)的運(yùn)轉(zhuǎn),主軸為中空軸,有循環(huán)空氣進(jìn)行冷卻,主軸前端有三個(gè)軸承后端一個(gè)軸承,主軸的中部與主軸箱之間有空氣間隔。主軸旋轉(zhuǎn)時(shí)軸承的內(nèi)外圈與滾子之間相對(duì)運(yùn)動(dòng)產(chǎn)生摩擦而發(fā)熱,熱量通過熱傳導(dǎo)分別傳遞到主軸、主軸箱體下部及主軸箱的其他部分。主軸溫度的升高是導(dǎo)致主軸熱伸長的主要原因,而主軸的熱伸長導(dǎo)致機(jī)床 z 方向產(chǎn)生熱誤差 Z;主軸箱體下部的溫升是導(dǎo)致主軸整體升高 h的主要原因,而主軸的整體升高導(dǎo)致機(jī)床 x 方向產(chǎn)生熱誤差x。 x由 S1、S3測量得到,取其平均值作為 x熱誤差值。
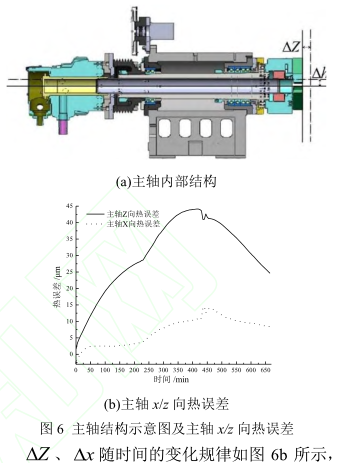
其變化規(guī)律與圖5a主軸箱溫度變化規(guī)律基本保持一致。這就說明主軸的熱變形與主軸箱溫度之間存在者密切的關(guān)系:隨著主軸箱溫度的升高,主軸的熱變形隨之增大,當(dāng)溫度最高時(shí)主軸的熱形達(dá)到最大值;主軸停止旋轉(zhuǎn)后主軸箱溫度逐漸下降,主軸的熱變形也隨之減小。S1/S3的采集值偏差較大,這說明主軸在徑向產(chǎn)生了偏擺,本文忽略了主軸在 x/y 方向的擺角問題。
2.2.3 進(jìn)給軸位置相關(guān)熱誤差分析
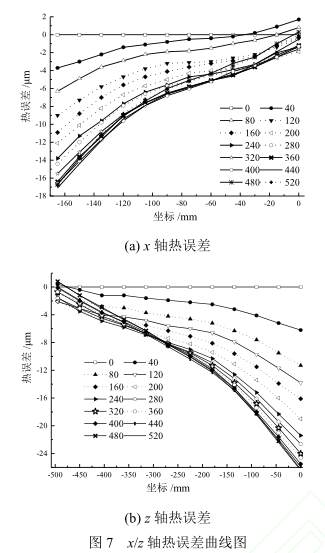
進(jìn)給軸 x、y 具有同樣的結(jié)構(gòu)形式,兩端分別為固定端和游動(dòng)端。當(dāng)進(jìn)給系統(tǒng)運(yùn)動(dòng)時(shí),電機(jī)、軸承、絲杠螺母副生熱,導(dǎo)致進(jìn)給軸絲杠受熱膨脹,固定端位置不變,游動(dòng)端向自由方向伸長,進(jìn)給軸在本實(shí)驗(yàn)中的熱變形如圖 7 所示。
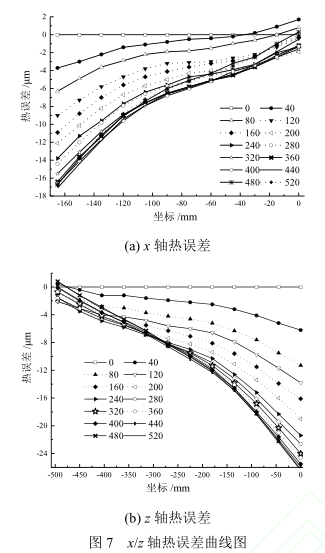
在冷態(tài)下第一次測量誤差作為機(jī)床的幾何誤差,即第一次冷態(tài)測量時(shí)各測點(diǎn)的熱誤差為 0,圖 7 說明各次測量的時(shí)間間隔,由圖可以看出,進(jìn)給軸的熱誤差與位置相關(guān),兩者之間近似成線性關(guān)系,且熱誤差隨坐標(biāo)位置的增大而增大。進(jìn)給軸的固定端熱誤差變化相對(duì)較小,而游動(dòng)端熱誤差變化相對(duì)較大,說明車床進(jìn)給軸位置坐標(biāo)距離電機(jī)越遠(yuǎn),定位精度越低,熱誤差越大,這種變化規(guī)律符合絲杠的結(jié)構(gòu)形式。電機(jī)端為絲杠的固定端,遠(yuǎn)離電機(jī)端為絲杠的游動(dòng)端。
3 熱誤差建模及補(bǔ)償實(shí)現(xiàn)
3.1 溫度測點(diǎn)優(yōu)化
3.1.1 模糊聚類分組
利用模糊聚類分析方法對(duì)溫度變量進(jìn)行分


3.1.2 基于相關(guān)分析的溫度測點(diǎn)篩選
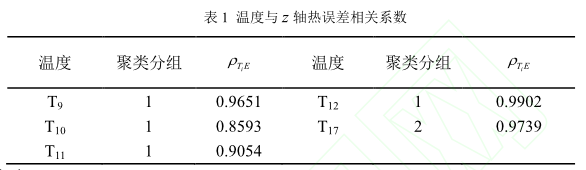
依據(jù)上述模糊聚類分組結(jié)果,應(yīng)用統(tǒng)計(jì)學(xué)相關(guān)性理論進(jìn)行測點(diǎn)優(yōu)化,求取Ti與熱誤差 E 的相關(guān)系數(shù)為

的平均值;iE 為熱誤差的平均值。相關(guān)系數(shù)如表1 所示,選擇每個(gè)聚類分組中相關(guān)系數(shù)大的溫度作為典型變量。故選擇 T12,和 T17為典型溫度變量。
以上介紹是以其中一項(xiàng)熱誤差為例,實(shí)際中熱誤差包括主軸熱伸長、主軸熱升高、x 進(jìn)給軸熱誤差及 y 軸進(jìn)給軸熱誤差,在進(jìn)行模糊聚類時(shí)需要針對(duì)不同的熱誤差項(xiàng)分別進(jìn)行聚類分組,得到與各個(gè)誤差項(xiàng)最相關(guān)的典型溫度變量。
3.2 熱誤差模型
溫度變量優(yōu)化之后可以進(jìn)行熱誤差數(shù)學(xué)模型的建立,主要有 BP 神經(jīng)網(wǎng)絡(luò)法、支持向量機(jī)法、多元線性回歸等,本文以多元線性回歸模型為例。基于多元線性回歸模型及實(shí)驗(yàn)數(shù)據(jù),可得到熱誤差的數(shù)學(xué)補(bǔ)償模型。分別建立機(jī)床主軸 x 向熱誤差與 z 向熱誤差、x 進(jìn)給軸及 y 進(jìn)給軸的熱誤差補(bǔ)償模型,即

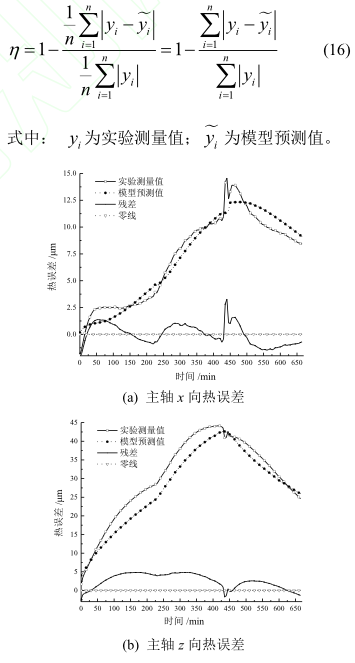
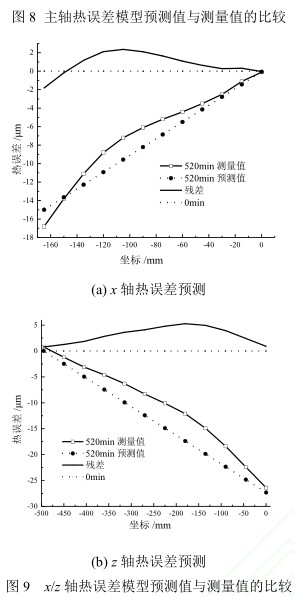
主軸x/z方向的熱誤差模型預(yù)測值的R和分別為 0.9μm、3.2μm 和 88.4%、90.7%;x/z 軸熱誤差模型預(yù)測值的 R 和? 分別為 1.4μm、3.4μm 和82.9%、71.3%。證明熱誤差模型具有很高的準(zhǔn)確性,在工程實(shí)際中還需進(jìn)一步驗(yàn)證。預(yù)測模型之所以沒有達(dá)到百分之百,任何一種模型都存在自身的模型誤差。此外,機(jī)床的誤差包括伺服誤差、插補(bǔ)誤差、跟隨誤差、幾何誤差、安裝誤差等,建模過程中這些系統(tǒng)誤差未予考慮,都會(huì)導(dǎo)致預(yù)測模型精度的降低,因此預(yù)測模型都存在一定的誤差。
3.3 機(jī)床熱誤差補(bǔ)償工程應(yīng)用
熱誤差補(bǔ)償系統(tǒng)的總體結(jié)構(gòu)設(shè)計(jì)主要有溫度采集系統(tǒng)和 PLC 補(bǔ)償系統(tǒng)兩部分組成。溫度采集系統(tǒng)用于獲取熱敏感點(diǎn)的溫度值,并對(duì)采集的溫度信號(hào)進(jìn)行濾波、放大及 A/D 轉(zhuǎn)換。獲取溫度之后在PLC內(nèi)部根據(jù)前面的數(shù)學(xué)模型分別計(jì)算出每個(gè)軸的補(bǔ)償參數(shù)tanoK。PLC 將補(bǔ)償參數(shù)通過Siemens828D 數(shù)控系統(tǒng)內(nèi)部特有的 PLC 與 NC 數(shù)據(jù)通信接口數(shù)據(jù)塊 DB1200 寫入 NC 系統(tǒng)內(nèi)部,NC 系統(tǒng)會(huì)根據(jù)熱誤差補(bǔ)償參數(shù)對(duì)機(jī)床各軸的插補(bǔ)指令做相應(yīng)調(diào)整,從而提高了機(jī)床各軸的定位精度。
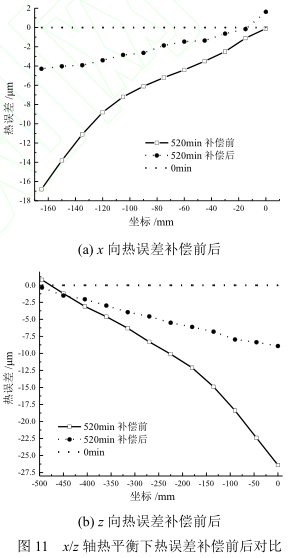
冷態(tài)下測量結(jié)束后根據(jù)實(shí)驗(yàn)測量原理開始運(yùn)轉(zhuǎn)機(jī)床,直至機(jī)床達(dá)到熱平衡狀態(tài)。機(jī)床在熱平衡狀態(tài)下補(bǔ)償前和補(bǔ)償后的熱誤差如圖 11 所示。實(shí)驗(yàn)過程中主軸與進(jìn)給軸同時(shí)運(yùn)轉(zhuǎn),使得機(jī)床主軸與進(jìn)給軸的熱誤差耦合在一起,從而驗(yàn)證熱誤差耦合模型的準(zhǔn)確性。補(bǔ)償前 x/z 軸的定位精度為18.6μm、24.3μm;補(bǔ)償后 x/z 軸的定位精度為7.4μm、10.5μm,補(bǔ)償后 x/z 軸的定位精度提高了60.3%、56.6%,充分驗(yàn)證了熱誤差耦合模型的準(zhǔn)確性。
4 結(jié) 論
本文深入研究了機(jī)床熱誤差補(bǔ)償理論及西門子 828D 數(shù)控系統(tǒng)熱誤差補(bǔ)償機(jī)制,開發(fā)了基于828D 的熱誤差補(bǔ)償系統(tǒng), 運(yùn)用多元線性回歸與模糊聚類相結(jié)合的方法建立機(jī)床各軸的熱誤差數(shù)學(xué)模型,并分析了主軸與進(jìn)給軸之間熱誤差耦合與解耦過程,建立了主軸與進(jìn)給軸之間的耦合模型,利用模糊聚類方法對(duì)溫度測點(diǎn)進(jìn)行優(yōu)化,選取熱敏感點(diǎn)典型溫度變量,降低了溫度變量之間多重共線性的問題,提高了熱誤差模型的預(yù)測精度。最后,將建好的主軸與進(jìn)給軸耦合模型嵌入 PLC中,在浙江海德曼機(jī)床廠生產(chǎn)的 HTC550/500 系列車床上得到實(shí)際應(yīng)用,并且進(jìn)行批量生產(chǎn),機(jī)床在不同溫度下的定位精度得到明顯的提高,也為后期機(jī)床熱誤差的研究工作提供了重要依據(jù)。
投稿箱:
如果您有機(jī)床行業(yè)、企業(yè)相關(guān)新聞稿件發(fā)表,或進(jìn)行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機(jī)床行業(yè)、企業(yè)相關(guān)新聞稿件發(fā)表,或進(jìn)行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
更多相關(guān)信息

業(yè)界視點(diǎn)
| 更多
查")
行業(yè)數(shù)據(jù)
| 更多
- 2025年1月 新能源汽車銷量情況
- 2024年12月 新能源汽車產(chǎn)量數(shù)據(jù)
- 2024年12月 基本型乘用車(轎車)產(chǎn)量數(shù)據(jù)
- 2024年12月 軸承出口情況
- 2024年12月 分地區(qū)金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2024年12月 金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2024年11月 金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2024年11月 分地區(qū)金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2024年11月 軸承出口情況
- 2024年11月 基本型乘用車(轎車)產(chǎn)量數(shù)據(jù)
- 2024年11月 新能源汽車產(chǎn)量數(shù)據(jù)
- 2024年11月 新能源汽車銷量情況
- 2024年10月 新能源汽車產(chǎn)量數(shù)據(jù)
博文選萃
| 更多
- 機(jī)械加工過程圖示
- 判斷一臺(tái)加工中心精度的幾種辦法
- 中走絲線切割機(jī)床的發(fā)展趨勢
- 國產(chǎn)數(shù)控系統(tǒng)和數(shù)控機(jī)床何去何從?
- 中國的技術(shù)工人都去哪里了?
- 機(jī)械老板做了十多年,為何還是小作坊?
- 機(jī)械行業(yè)最新自殺性營銷,害人害己!不倒閉才
- 制造業(yè)大逃亡
- 智能時(shí)代,少談點(diǎn)智造,多談點(diǎn)制造
- 現(xiàn)實(shí)面前,國人沉默。制造業(yè)的騰飛,要從機(jī)床
- 一文搞懂?dāng)?shù)控車床加工刀具補(bǔ)償功能
- 車床鉆孔攻螺紋加工方法及工裝設(shè)計(jì)
- 傳統(tǒng)鉆削與螺旋銑孔加工工藝的區(qū)別