



采用機器人上下料的輪轂夾具設計與分析
2024-7-4 來源: 四川九洲電器集團有限責任公司 作者: 明濤 李劍
【摘要】: 工業機器人越來越多的應用到智能制造領域,最典型的應用之一就是配合數控機床實現機床自動上下料,從而實現一定程度的無人值守,提高生產效率,降低人工成本。結合實際情況,本文首先對機器人進行了選型,然后對夾具進行設計和分析,為系統制造提供依據。
機器人技術是機械、電子、軟件等多學科交叉融合的新技術,不僅是工科領域最具代表性的前沿交叉學科之一,也是我國重點發展戰略領域之一,隨著我國科技的不斷進步和制造業的不斷升級,采用工業機器人代替人工生產,實現自動化、無人化、智能化,可以有效降低企業生產成本,提高經濟效益。本文在選定成熟機器人的基礎上,針對零件具體情況,設計合適的夾具以實現整個機器人上下料系統的功能。本文采用 SolidWorks軟件進行夾具的設計和分析,SolidWorks 是世界知名的三維設計軟件,功能強大,集設計、仿真、渲染等功能于一體,能夠方便快捷實現產品設計跟優化。
1. 機器人上下料系統整體設計
如圖 1 所示,數控車加工中心為主體設備,機器人放置在車床正前方,機器人左側可設置傳送線用于待加工零件的來料,機器人右側可設置傳送線用于已加工零件的走料。機器人跟車床之間通常需要留有約 1 米的間距,如果機器人出現故障,可臨時沿用傳統的人工吊裝等方式實現上下料,不耽誤生產。
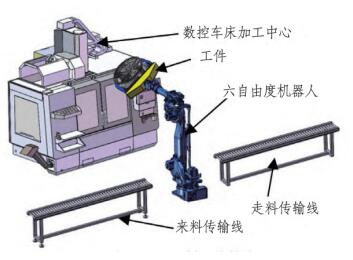
圖 1 機器人上下料系統整體
2. 工業機器人
工業機器人根據用途有不同的類型可以選擇,本文中上下料需要機器人有更多的自由度,因此本文選擇六自由度機器人。由于零件重量為46kg,夾具重量假設跟零件重量相當,則機器人末端負載約 100kg。考慮機器人高速運動帶來的額外負載以及價格因素,本文選用四大家族之一的安川 GP110 機器人。安川作為機器人品牌全球四大家族之一,其產品性能穩定可靠,功能強大。該款機器人運動半徑高達 2236mm,具體技術參數如圖 2 所示。

圖 2 機器人主要技術參數
3. 夾具設計
夾具作為系統的主要部件之一,在設計的時候需要確保其穩定可靠。首先,需要分析被夾持工件的特點,被夾持的工件是回轉件,其材料為鋁合金,其重量約 46kg,夾持的時候不能損傷工件表面。其次,分析夾持要求,夾持的時候需要同時考慮夾持和定位,工件被定位后才能準確抓取到機床上。基于上述條件,夾具的構想方案如圖 3 所示,夾具具備兩個夾持板,夾持板上設置 2 個能夠滾轉的輪子用于夾持過程中工件跟夾具實現自適應定心。同時,夾持板能夠在夾具基座上相對滑動,并且需要保持一定的剛性。
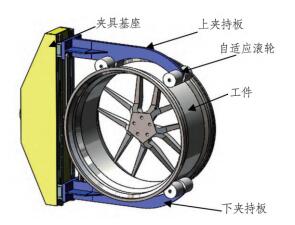
圖 3 夾具方案
加工生產,效率是非常重要的因素之一,為了提高夾持響應,本文采用連桿驅動的方式,驅動夾持板的夾持和松開動作。同時,為了實現夾持定心,則需要兩個夾持板能夠繞夾具中心同步夾持和張開。為此,連桿采用中心對稱的雙曲柄滑塊機構實現。夾具上的兩個夾持板即為機構對應的滑塊,如圖 4 所示。
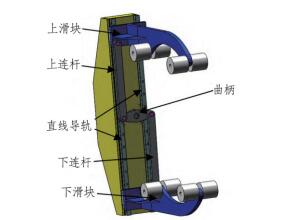
圖 4 雙曲柄滑塊機構
4. 夾具計算及分析
(1)驅動電機計算及選擇

圖 5 連桿尺寸
如圖 5 所示,驅動軸旋轉帶動曲柄旋轉,曲柄帶動連桿拉動滑塊運動,在圖示處實現夾具對輪轂的夾持,此時曲柄垂直連桿,輸出力最大。
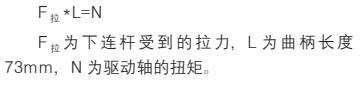
分析連桿受到的拉力,乘上一定的安全系數就能得到驅動軸所需要的扭矩,在圖 5 所示狀態下,下連桿受到的拉力最大,為一側夾持板及滑持板、滑塊、工件的重力合計約 550N。注意到,上夾持板及滑塊的重力同樣通過上連桿作用到驅動軸上,因此還需要增加上夾持板及滑塊的重力約 90N,作用在驅動軸上的重力總共約 640N。則驅動軸需要的扭矩為
取 2 倍安全系數則驅動軸需要的扭矩約93N · m。假設夾持過程需要耗時 1s,夾持過程驅動軸需要旋轉 60°。則驅動軸所需轉速為 10r/min。電機所需要功率如下 :

考慮后期提速并且保留更多余量,電機選用松下 200W 伺服電機,配置速比 150 的減速機。電機及參數如圖 6 所示。

圖 6 伺服電機及參數
(2)直線導軌的選擇
根據上文中計算,直線導軌主要需滿足扭矩需求,為確保夾具剛性,直線導軌在 100N·m扭矩基礎上再取一定安全系數選擇 IAS23-H42-L600 型直線導軌,其行走方向扭矩高達550N · m。具體參數如圖 7 所示。
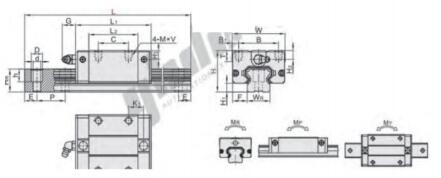
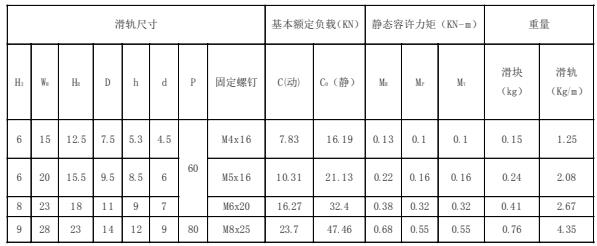
圖 7 直線導軌參數
(3)夾持板仿真
仿真采用三維軟件自帶插件 ——Simulation,Simulation 是 SolidWorks 公司推出的一套有限元分析軟件。它作為嵌入式分析軟件與 SolidWorks 無縫集成,運用simulation,普通工程師就可以進行工程分析并可以迅速得到分析結果。
夾具的導軌有具體的參數指標,而且按照很高的安全系數選取,因此不需要擔心性能。夾持板為關鍵零件且為自制件,需對其進行仿真分析,上下兩個夾持板完全對稱,因此,對一側夾持板分析即可。
對需要仿真的模型參數進行設定,確定零件實際受力方式,如圖 8 所示。夾持板底座固定在導軌滑塊上,兩處安裝滾輪的夾持軸孔受到夾持的反作用力。因此,設定夾持板底座為固定,設定夾持軸孔受力,根據角度分布,其合力為工件的重力 460N,取一定安全系數,取每個夾持孔受力大小為 300N,方向垂直圓弧切面且反向指向圓心。
圖 8 夾持板參數設定
準備好模型后,對其進行網格劃分,如圖9 所示。
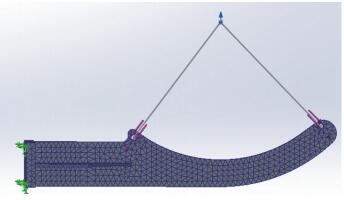
圖 9 夾持板網格劃分
網格劃分好后就可以開始仿真,仿真結果如圖 10、圖 11 所示。可以看到,夾持板的強度和剛性均滿足要求。

圖 10 夾持板強度仿真結果
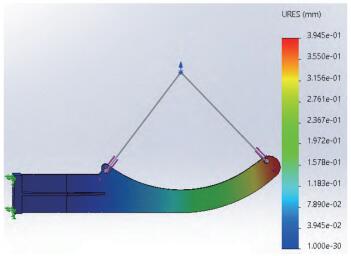
圖 11 夾持板剛度仿真結果
5.結論
本研究通過 SolidWorks 繪制夾具的三維模型,并且通過計算和仿真確定了夾具的器件及關鍵自制件滿足設計要求,為機器人自動上下料系統的夾具制作及系統制作提供了理論依據,為用戶提供一種基于三維建模的快速夾具設計環境。
投稿箱:
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信息

