



智能滅火機器人設計方案
2017-5-5 來源:山東科技大學電氣與自動化工程學院自動化系 作者:董蘊慧 , 畢征程 , 張 程 , 呂光
摘要:根據制造一個自主控制的機器人在一間平面結構房子模型里運動并找到一根蠟燭盡快將它熄滅的任務,利用開關二極管、濾波電容、電阻、光電耦合、L298N、LM2596 等元器件,設計出穩壓降壓電路和 L298N 驅動模塊的 PCB 板,并通過 STC12C5A60S2 單片機導入自己設計的一系列如尋墻、尋火、滅火、回家等子程序,合理布局地面灰度傳感器、紅外光電傳感器并在不斷改進和調試下成功制作出能夠準確完成任務的滅火機器人。
關鍵詞:機器人 ; 滅火 ; 傳感器 ; 電機驅動 ; 穩壓電路
1.系統的整體方案設計
整體選定右手法則,即小車基本一直沿右墻走,當進入房間后,如果沒有火,則尋找下一個房間;如果有火,則開始執行尋火程序,直到離蠟燭 30cm 的檢測到白線,再利用風扇將蠟燭熄滅,完成滅火功能。因此設計的小車要求能夠及時調節前進的方向,以便快速進入房間,順利找到火源。系統總體設計框圖如圖 1:

圖 1 系統總體設計框圖
2.硬件設計
該方案是設計一個在規定區域能自主搜索火源并實施滅火的智能機器人小車,設計使用的主控芯片為 STC12C5A60S2 單片機,設計重點在傳感器和電機驅動上
2.1DC-DC 降壓電路
采用 LM2596s-5.0 芯片。輸入端給入 11.1V~12.8V 電壓,輸出端輸出 5V 電壓。LM2596 開關電壓調節器是降壓型電源管理單片集成電路,能夠輸出 3A 的驅動電流,同時具有很好的線性和負載調節特性。本方案采用 LM2596s-5.0,輸入端給入 11.1V~12.8V 電壓,輸出端輸出5V 電壓。該器件內部集成頻率補償和固定頻率發生器,開關頻率為150KHz,與低頻開關調節器相比較,可以使用更小規格的濾波元件。由于該器件只需 4 個外接元件,可以使用通用的標準電感,這更優化了 LM2596 的使用,極大地簡化了開關電源電路的設計。
2.2 避障傳感器及其輔助電路
本方案采用紅外測距傳感器來實現過程中的尋墻功能。紅外傳感器是一種集發射與接收于一體的光電傳感器。具有受可見光干擾小、價格便宜、易于配裝、使用方便的特點。檢測距離可以根據要求適度調節。
兩種紅外傳感器均在傳感器接收不到反射光時,輸出高電平;當傳感器接收到反射光時,輸出低電平。通過前面五個、左邊兩個、右邊一個共八個傳感器的信號,實現左右手法走迷宮、倒車、旋轉等功能。
2.3火焰傳感器及其輔助電路
該方案為實現探測火源的功能,采用 6 路火焰傳感器來探測房間內的是否有火源。能夠探測火焰發出的波段范圍分別為 700—1100 nm的短波近紅外線 (SW-NIR),通過電信號(電壓信號)進行輸出。當傳感器接收到火焰信息時,輸出電壓為 0.5~2.5V。通過給單片機的比較口的輸入信號電壓,即可實現測火。傳感器探測距離可達 2m,但受日光影響較大。通過信號燈的導通狀態,可觀察是否檢測到信號。
2.4灰度傳感器及其輔助電路
灰度傳感器的主要作用是探測房間門口處,終點處以及火焰圈處的白線。該方案采用的型號為:CK019 循跡傳感器。檢測距離為1~3cm。白線輸出高電平,黑線輸出低電平。
3.軟件設計
軟件設計方案是以上述硬件電路為基礎的,包括電機控制模塊、傳感器模塊的程序設計與實現。程序設計采用 C 語言編寫,編程環境是集成 Keil C51 編譯器的集成編譯環境。滅火機器人設計的軟件設計結構框圖如圖 2 所示。
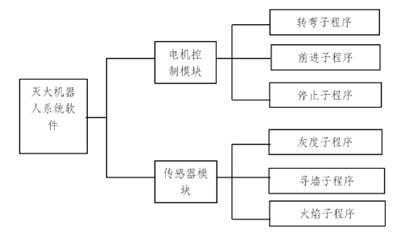
圖 2 系統軟件設計框圖
4總結
本次的滅火機器人小車設計主要涉及驅動模塊、避障模塊、灰度模塊、滅火模塊、單片機開發、程序設計等等。我們采用額定電壓為12V,轉速為 333rad/s 的電機,11.1V,25C 的電池,并在小車左右分別加了一個傳感器作為反饋調節消除誤差,設計出運行穩定的智能滅火機器人。
投稿箱:
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信息

