


電氣化設(shè)計(jì)在數(shù)控機(jī)床參數(shù)調(diào)試與日常維修中的應(yīng)用
2020-12-21 來(lái)源:中國(guó)航發(fā)貴州黎陽(yáng)航空發(fā)動(dòng)機(jī)有限公司 作者:崔紅利,吳玉舫
摘要:使用基于微矩陣參數(shù)調(diào)試方式,缺少對(duì)實(shí)際機(jī)床精度參數(shù)考慮,導(dǎo)致參數(shù)調(diào)試結(jié)果并不精準(zhǔn)。為了改善該情況,提出了電氣化設(shè)計(jì)在數(shù)控機(jī)床參數(shù)調(diào)試與日常維修中的應(yīng)用。根據(jù)不同的控制要求設(shè)定CNC參數(shù),確定主軸轉(zhuǎn)速和程序指令轉(zhuǎn)速之間零偏移和增益偏移誤差,通過(guò)調(diào)整該誤差,維護(hù)CNC。把數(shù)控CNC輸入的仿真量轉(zhuǎn)化為用于主軸電機(jī)上的的實(shí)際轉(zhuǎn)速,以使得主軸的實(shí)際輸出速度可以保持與數(shù)控仿真量相同,維護(hù)變頻器。觀察刀具庫(kù)和刀架的碰撞,確定角度偏差,調(diào)整位置編碼器方向停止位置和偏移方向停止位置,使其恢復(fù)到原來(lái)位置,維護(hù)主軸。通過(guò)修改No.1850(網(wǎng)格偏重)減速塊位置參數(shù),維護(hù)機(jī)床。描述數(shù)控機(jī)床典型體及其相鄰低序幾何,確定坐標(biāo)系中位置姿態(tài),對(duì)于數(shù)控機(jī)床中參數(shù)調(diào)試誤差研究可以轉(zhuǎn)化為坐標(biāo)系行為研究,由此修正參數(shù)調(diào)試誤差。由實(shí)驗(yàn)結(jié)果可知,電氣化設(shè)計(jì)方法在靜態(tài)工作模式下,參數(shù)調(diào)試方式主軸工作電流與實(shí)際電流一致,實(shí)際位置跟蹤誤差為0A;在動(dòng)態(tài)工作模式下,轉(zhuǎn)速與實(shí)際轉(zhuǎn)速一致,實(shí)際位置跟蹤誤差為0轉(zhuǎn)/分,為數(shù)控機(jī)床穩(wěn)定運(yùn)行奠定基礎(chǔ)。
關(guān)鍵詞:電氣化設(shè)計(jì);數(shù)控機(jī)床;參數(shù)調(diào)試;日常維修
0、引言
人們對(duì)機(jī)械產(chǎn)品的需求日益增長(zhǎng),要求也日益提高。常規(guī)加工設(shè)備已不適應(yīng)這種發(fā)展需要,因此,數(shù)控機(jī)床的出現(xiàn)勢(shì)在必行。以往使用基于微矩陣參數(shù)調(diào)試方式,需要計(jì)算每一參數(shù)的靈敏度,但由于未考慮各種參數(shù),如備用電池出現(xiàn)故障,數(shù)控系統(tǒng)操作員誤操作,電網(wǎng)瞬間斷電,造成部分參數(shù)丟失或變化,影響機(jī)床正常工作,導(dǎo)致實(shí)際機(jī)床參數(shù)調(diào)試結(jié)果不準(zhǔn)確,影響了數(shù)控機(jī)床的加工精度。如果用戶能夠充分了解參數(shù)意義,將為故障診斷帶來(lái)極大便利,通過(guò)機(jī)器電子控制系統(tǒng)實(shí)現(xiàn)對(duì)機(jī)床作業(yè)的模擬,為了使操作人員的工作效率變得更加高效,盡心了數(shù)字化技術(shù)的結(jié)合。
CNC機(jī)床是一種結(jié)合了電、氣、機(jī)于一體的一體化機(jī)器,其最為重要的組成部分是電控系統(tǒng),一旦電力系統(tǒng)出現(xiàn)任何的問(wèn)題,機(jī)床的工作都會(huì)受到影響,無(wú)法正常工作。因此在進(jìn)行對(duì)數(shù)控機(jī)床的日常調(diào)試和維護(hù)時(shí),機(jī)器電子控制系統(tǒng)模擬機(jī)床的工作過(guò)程,并結(jié)合數(shù)字技術(shù)來(lái)提高操作者的工作效率。電控系統(tǒng)是保證CNC機(jī)床自動(dòng)化運(yùn)行的核心部分,一旦出現(xiàn)故障,將影響CNC機(jī)床的正常工作。因此在數(shù)控機(jī)床參數(shù)調(diào)試和日常維護(hù)中,電氣化設(shè)計(jì)十分必要。
1 、基于電氣化設(shè)計(jì)數(shù)控機(jī)床參數(shù)調(diào)試與維護(hù)
數(shù)控機(jī)床參數(shù)調(diào)試主要包括主軸相關(guān)參數(shù)和信號(hào)調(diào)節(jié)結(jié)果,這對(duì)變頻器自身參數(shù)調(diào)試來(lái)說(shuō)具有重要意義。通過(guò)調(diào)試,確保數(shù)控機(jī)床能按要求發(fā)出正確的模擬電壓信號(hào),驅(qū)動(dòng)主軸經(jīng)過(guò)變頻調(diào)速后能正常工作。
1.1 CNC參數(shù)調(diào)試與維護(hù)
在整個(gè)參數(shù)調(diào)控過(guò)程中,CNC參數(shù)是按照所需進(jìn)行設(shè)定的,同時(shí)需要在主軸轉(zhuǎn)速上顯示控制的結(jié)果,保證參數(shù)與主軸轉(zhuǎn)速輸出結(jié)果一一對(duì)應(yīng)。以數(shù)控車床主軸電氣設(shè)計(jì)為例,進(jìn)行了仿真分析,設(shè)置轉(zhuǎn)速命令輸出限值(模擬量)為10V,主軸檔位1~3對(duì)應(yīng)的最高轉(zhuǎn)速分別是1500r/min,3000r/min,4500r/min,在數(shù)控機(jī)床上設(shè)定的主軸參數(shù)如表1所示。

在采用模擬輸出主軸的情況下,由于溫度和元件特性的變化,實(shí)際主軸轉(zhuǎn)速和程序指令轉(zhuǎn)速之間可能存在較大誤差。當(dāng)系統(tǒng)無(wú)編程工作時(shí),CNC參數(shù)為輸出模擬量,此時(shí)電壓為0V。在完成表1中的參數(shù)設(shè)置后,可以通過(guò)參數(shù)#1~#6進(jìn)行調(diào)整。以下是調(diào)整的方法和步驟:Step1:測(cè)量CNC輸出的模擬電壓,輸入M03S0指令,用萬(wàn)用表測(cè)量逆變器兩端電壓值為-0.20V;Step2:輸入M03S4000指令,測(cè)得兩端電壓值為10V,記錄數(shù)據(jù)如表2所示。

Step3:輸入數(shù)字#1~#6,使該數(shù)字生效,并驗(yàn)證該數(shù)字輸出的模擬電壓;Step4:重復(fù)測(cè)試1的操作,分別測(cè)量速度為0和最高速度的模擬電壓,完成參數(shù)調(diào)整。
1.2 變頻器參數(shù)調(diào)試與維護(hù)
在調(diào)試變頻器參數(shù)時(shí),主軸電機(jī)的所需要的實(shí)際轉(zhuǎn)速是通過(guò)對(duì)CNC輸入的模擬量進(jìn)行轉(zhuǎn)換得到的,變頻器參數(shù)調(diào)整如表3所示。
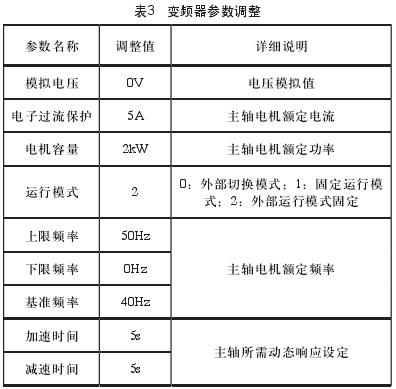
結(jié)合表3變頻器參數(shù)調(diào)整結(jié)果,需要設(shè)定系統(tǒng)運(yùn)行速度與電流,保證主軸實(shí)際輸出結(jié)果與數(shù)控模擬結(jié)果一致。
1.3 主軸參數(shù)調(diào)試與維護(hù)
機(jī)器刀庫(kù)為滾筒刀庫(kù),不需要機(jī)械手來(lái)?yè)Q刀。一般工具更換過(guò)程如下:當(dāng)機(jī)床收到工具更換指令后,主軸升至工具更換位置并停止時(shí),“工具更換”程序就會(huì)從缸軸向前,并將空鼓的工具位置插入主軸工具箱。在把手凹槽處,用夾緊彈簧夾住滾筒,主軸工具自動(dòng)夾緊釋放機(jī)構(gòu),松開(kāi)切削刀,主軸上移,完成切削刀的提取過(guò)程;畫(huà)好切削刀,旋轉(zhuǎn)選擇工具[4]。對(duì)刀庫(kù)和刀架進(jìn)行
了碰撞實(shí)驗(yàn),結(jié)果表明,位于刀架上的軸鍵槽和刀架的關(guān)鍵部分并不在一個(gè)位置,而且具有一定的角度偏差,從而引起碰撞。刀架上的鍵是和主軸的中心在一個(gè)水平線上。由此可以推論,刀架的鍵槽之所以沒(méi)有匹配刀架的關(guān)鍵位置,是因?yàn)橹鬏S的停止位置不在其原本應(yīng)在的正常位置上,主心軸尚未拆開(kāi)。因此,對(duì)于主軸維護(hù),需要調(diào)整主軸的定位位置,使其回到正常的位置。因?yàn)榉较蛭恢檬峭ㄟ^(guò)對(duì)4031號(hào)和4077號(hào)兩個(gè)任何參數(shù)進(jìn)行調(diào)整來(lái)恢復(fù)到之前原本的準(zhǔn)確位置,也就是可以排除由于更換機(jī)床刀具引起的故障。
1.4 機(jī)床參數(shù)調(diào)整與維護(hù)
在CNC數(shù)控機(jī)床進(jìn)行減速擋塊的調(diào)整時(shí),偶爾會(huì)有回零的位置不一樣的情況。通過(guò)觀察發(fā)現(xiàn),機(jī)床減速在進(jìn)行參考點(diǎn)返回的時(shí)候,出現(xiàn)了一次結(jié)果為零的制動(dòng)過(guò)程,但是這往往會(huì)導(dǎo)致制動(dòng)的位置或前或后的出現(xiàn)一個(gè)螺距的位移,這也是機(jī)床位置編碼器發(fā)展上的一次改革創(chuàng)新,這可能是因?yàn)闁鸥裥盘?hào)產(chǎn)生的減速信號(hào)離開(kāi)開(kāi)關(guān)太近所造成的。因?yàn)閭魉湾e(cuò)誤等原因,柵格信號(hào)正好漏掉了,必須等待下一個(gè)信號(hào)到達(dá)才能停止,這樣就會(huì)使停止位置或前或后出現(xiàn)一個(gè)絲杠螺距的移動(dòng)。這樣,可通過(guò)修改No.1850(網(wǎng)格偏重)減速塊的位置或修改信號(hào)參數(shù),使網(wǎng)格信號(hào)產(chǎn)生時(shí)間從減速信號(hào)關(guān)閉到啟動(dòng)時(shí)間,從而避免了這一問(wèn)題出現(xiàn)。
2 、參數(shù)調(diào)試誤差修正
在參數(shù)調(diào)試方面,除了用戶感覺(jué)到的是否達(dá)到精度要求外,還需通過(guò)模擬處理、誤差分析了解使用數(shù)控機(jī)床調(diào)試電氣設(shè)計(jì)參數(shù),以及數(shù)控機(jī)床主軸加工方向,對(duì)于參數(shù)均優(yōu)和參數(shù)不優(yōu)兩種情況,需對(duì)數(shù)控機(jī)床主軸加工方向展開(kāi)分析,如圖1所示。
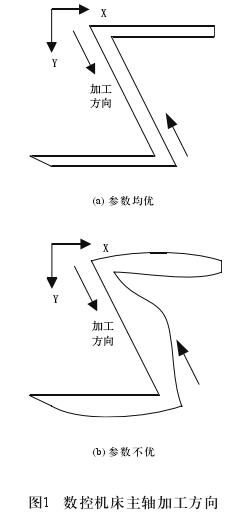
深入研究分析由Z字中選取“\”的筆畫(huà),通過(guò)加工方向圖可發(fā)現(xiàn),X/Y在軸速度為正的時(shí)候接收到了同步信號(hào),然而實(shí)際模式則是出現(xiàn)在X軸方向的反應(yīng)比較慢, 而出現(xiàn)在Y軸方向的反應(yīng)卻是正常的,這也就使得開(kāi)始點(diǎn)與結(jié)束點(diǎn)都變成了拋物線形狀的斜線。由此可知,確定出口標(biāo)志的斜線段起點(diǎn)X軸的實(shí)際產(chǎn)生的位移值一直比出口標(biāo)志的斜線段低主要原因,所以需要通過(guò)增加X(jué)軸的度。
參調(diào)主軸參數(shù)誤差分析時(shí)的主要工作是進(jìn)行確認(rèn)圓周半徑和角度誤差的精度是否在所需的范圍內(nèi),如果半徑誤差超過(guò)了所要求的精度范圍時(shí),則需要增加X(jué)/Y軸伺服系統(tǒng)的剛度;如果角誤差超過(guò)精度要求范圍的時(shí)候,則需要對(duì)主刀的升刀延遲時(shí)間和刀降的推進(jìn)時(shí)間進(jìn)行增加,該過(guò)程是通過(guò)插補(bǔ)控制器完成的,進(jìn)而使伺服系統(tǒng)位置跟蹤精準(zhǔn)度得到一定的提升。設(shè)數(shù)控機(jī)床典型體Bk
及其相鄰低序Bj,如圖2所示
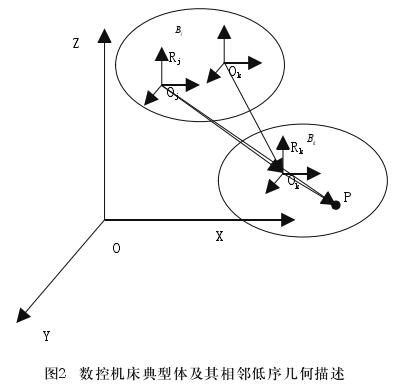
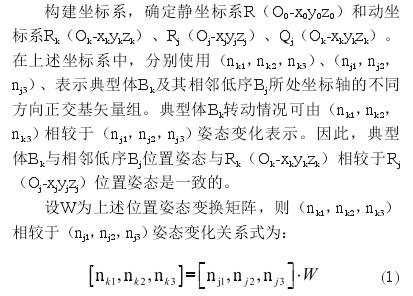
描述了位置姿態(tài)變換關(guān)系,即為相鄰體變換矩陣,對(duì)于數(shù)控機(jī)床中參數(shù)調(diào)試誤差研究可以轉(zhuǎn)化為坐標(biāo)系行為研究。
在四個(gè)象限內(nèi)分析軸心運(yùn)動(dòng)的輪廓誤差,如果存在于同一個(gè)象限上同一起點(diǎn)的半徑誤差和半徑誤差完全一致,而且半徑誤差在兩個(gè)不同的象限內(nèi),那么X/Y軸的PID參數(shù)值保持不變,主軸運(yùn)動(dòng)輪廓如圖3所示。
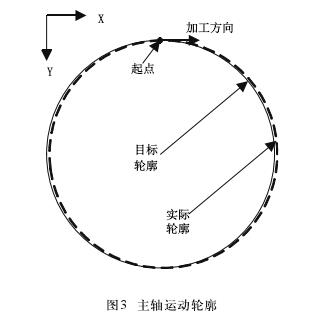
從圖3可以得知,當(dāng)半徑誤差同時(shí)滿足在第二象限而且在第一象限的起始點(diǎn)相同時(shí),如果兩象限和半徑誤差大于精度要求,X/Y軸的位置跟蹤性能應(yīng)該進(jìn)行一定的改善;如果第一象限和半徑誤差高于精度要求,那么X/Y軸的位置跟蹤性能需要進(jìn)行一定程度上的完善;也可以根據(jù)圓口曲線是內(nèi)、外的圓口曲線還是外的圓口曲線,判斷軸伺服系統(tǒng)的軟化特性,結(jié)合圖3中的輪廓輪廓可以看出,X軸的動(dòng)態(tài)性能不良會(huì)出現(xiàn)一些偏差,但通過(guò)對(duì)上述內(nèi)容進(jìn)行修正,可以完成參數(shù)修正。
3 、實(shí)驗(yàn)
針對(duì)電氣化設(shè)計(jì)在數(shù)控機(jī)床參數(shù)調(diào)試與日常維修中的應(yīng)用合理性,展開(kāi)分析。
3.1 模擬主軸系統(tǒng)組成
數(shù)控系統(tǒng)模擬主軸控制系統(tǒng)電氣化原理圖如圖4 所示。

由圖4可以得出,CNC數(shù)控系統(tǒng)的JA40接口輸出電壓為0~15V的模擬電壓,E700變頻器上的兩個(gè)Q1、Q2子端接收模擬電壓信號(hào),該模擬信號(hào)是通過(guò)JA40接口輸出的,由JD1A接口輸出的轉(zhuǎn)向信號(hào)則由子端接收,JA7A接入由主軸編碼器反饋得到的信號(hào)。
3.2 數(shù)控機(jī)床性能調(diào)試
對(duì)于數(shù)控機(jī)床性能調(diào)試,分別從靜態(tài)工作模式和動(dòng)態(tài)工作模式兩個(gè)方面展開(kāi)。
3.2.1 靜態(tài)工作模式
當(dāng)數(shù)控機(jī)床在靜態(tài)工作模式下,主軸工作電流和位置跟蹤誤差如圖5所示。

由圖5可知,4個(gè)特征點(diǎn)下主軸工作電流分別為1.1A、0.3A、0.25A、0.2A,針對(duì)這4個(gè)特征點(diǎn)的位置跟蹤誤差電流分別為0A、0.8 A、0.85 A、0.2A。基于該內(nèi)容,分別使用基于微矩陣參數(shù)調(diào)試方式和電氣化設(shè)計(jì)參數(shù)調(diào)試方式對(duì)該工作模式下的實(shí)際主軸工作電流和位置跟蹤誤差展開(kāi)分析,結(jié)果如表4所示。

由表4可知,使用基于微矩陣參數(shù)調(diào)試方式主軸工作電流與實(shí)際電流相差較大,其中實(shí)際位置跟蹤誤差最大為0.5A,而使用電氣化設(shè)計(jì)參數(shù)調(diào)試方式主軸工作電流與實(shí)際電流一致,實(shí)際位置跟蹤誤差為0A,由此說(shuō)明,當(dāng)數(shù)控機(jī)床在靜態(tài)工作模式下,電氣化設(shè)計(jì)參數(shù)調(diào)試方式合理。
3.2.2 動(dòng)態(tài)工作模式
當(dāng)數(shù)控機(jī)床在靜態(tài)工作模式下,實(shí)際轉(zhuǎn)速和位置跟蹤誤差如圖6所示。
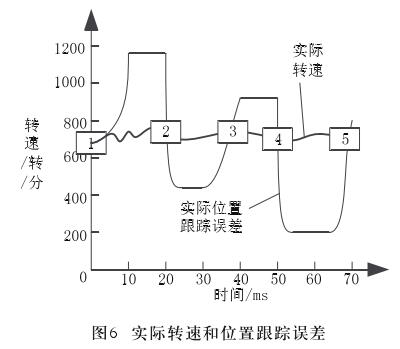
由圖6可知,5個(gè)特征點(diǎn)下實(shí)際轉(zhuǎn)速分別為700轉(zhuǎn)/分、750轉(zhuǎn)/分、740轉(zhuǎn)/分、680轉(zhuǎn)/分、680轉(zhuǎn)/分,針對(duì)這5個(gè)特征點(diǎn)的位置跟蹤誤差轉(zhuǎn)速均為0轉(zhuǎn)/分。基于該內(nèi)容,分別使用基于微矩陣參數(shù)調(diào)試方式和電氣化設(shè)計(jì)參數(shù)調(diào)試方式對(duì)該工作模式下的實(shí)際轉(zhuǎn)速和位置跟蹤誤差展開(kāi)分析,結(jié)果如表5所示。

由表5可知,使用基于微矩陣參數(shù)調(diào)試方式轉(zhuǎn)速與實(shí)際轉(zhuǎn)速存在一定偏差,其中實(shí)際位置跟蹤誤差最大為70轉(zhuǎn)/分,而使用電氣化設(shè)計(jì)參數(shù)調(diào)試方式轉(zhuǎn)速與實(shí)際轉(zhuǎn)速一致,實(shí)際位置跟蹤誤差為
0轉(zhuǎn)/分,由此說(shuō)明,當(dāng)數(shù)控機(jī)床在動(dòng)態(tài)工作模式下,電氣化設(shè)計(jì)參數(shù)調(diào)試方式合理。
4 、結(jié)語(yǔ)
主軸控制系統(tǒng)的調(diào)試是數(shù)控機(jī)床調(diào)試的重點(diǎn),若輸入的指令和主軸的實(shí)際轉(zhuǎn)速不符,且在進(jìn)行零件加的時(shí)候誤差較大,就需要對(duì)主軸進(jìn)行調(diào)試。因?yàn)殡姎饣O(shè)計(jì)在進(jìn)行參數(shù)調(diào)試的時(shí)候主要側(cè)重于對(duì)主軸主軸控制系統(tǒng)的硬件組成進(jìn)行模擬和調(diào)試,缺乏分析了解數(shù)控機(jī)床軟件的功能部分,所以今后可以在調(diào)試過(guò)程中總結(jié)和積累更加豐富的經(jīng)驗(yàn),進(jìn)而完善和提高在調(diào)試和維修方面的技能。
投稿箱:
如果您有機(jī)床行業(yè)、企業(yè)相關(guān)新聞稿件發(fā)表,或進(jìn)行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機(jī)床行業(yè)、企業(yè)相關(guān)新聞稿件發(fā)表,或進(jìn)行資訊合作,歡迎聯(lián)系本網(wǎng)編輯部, 郵箱:skjcsc@vip.sina.com
更多相關(guān)信息

業(yè)界視點(diǎn)
| 更多
查")
行業(yè)數(shù)據(jù)
| 更多
- 2025年1月 新能源汽車銷量情況
- 2024年12月 新能源汽車產(chǎn)量數(shù)據(jù)
- 2024年12月 基本型乘用車(轎車)產(chǎn)量數(shù)據(jù)
- 2024年12月 軸承出口情況
- 2024年12月 分地區(qū)金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2024年12月 金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2024年11月 金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2024年11月 分地區(qū)金屬切削機(jī)床產(chǎn)量數(shù)據(jù)
- 2024年11月 軸承出口情況
- 2024年11月 基本型乘用車(轎車)產(chǎn)量數(shù)據(jù)
- 2024年11月 新能源汽車產(chǎn)量數(shù)據(jù)
- 2024年11月 新能源汽車銷量情況
- 2024年10月 新能源汽車產(chǎn)量數(shù)據(jù)
博文選萃
| 更多
- 機(jī)械加工過(guò)程圖示
- 判斷一臺(tái)加工中心精度的幾種辦法
- 中走絲線切割機(jī)床的發(fā)展趨勢(shì)
- 國(guó)產(chǎn)數(shù)控系統(tǒng)和數(shù)控機(jī)床何去何從?
- 中國(guó)的技術(shù)工人都去哪里了?
- 機(jī)械老板做了十多年,為何還是小作坊?
- 機(jī)械行業(yè)最新自殺性營(yíng)銷,害人害己!不倒閉才
- 制造業(yè)大逃亡
- 智能時(shí)代,少談點(diǎn)智造,多談點(diǎn)制造
- 現(xiàn)實(shí)面前,國(guó)人沉默。制造業(yè)的騰飛,要從機(jī)床
- 一文搞懂?dāng)?shù)控車床加工刀具補(bǔ)償功能
- 車床鉆孔攻螺紋加工方法及工裝設(shè)計(jì)
- 傳統(tǒng)鉆削與螺旋銑孔加工工藝的區(qū)別