



基于球桿儀的五軸機床 RTCP 誤差檢測及補償
2021-3-11 來源:沈機 ( 上海 ) 智能系統研發設計有限 作者:虞 敏 趙建華
引言: RTCP( rotational tool center point) 功能是五軸機床的一個重要功能,字面意思是 “旋轉刀具中心”,業內往往會稍加轉義為 “圍繞刀具中心轉”,也有一些人直譯為 “旋轉刀具中心編程”。其實質為保持刀具中心點不變實現刀具的轉動。RTCP 功能的加入有效地提高了數控機床的加工效率,因此,RTCP 精度是五軸聯動數控機床的重要精度指標。
目前 RTCP 誤差檢測大多采用標準棒 ( 球頭檢棒或直棒等 ) 配合千分表 ( 百分表等 ) 的方式測量。這種方法會引入標準棒的輪廓誤差以及千分表的讀數偏差,降低 RTCP 誤差補償效果,并且需要人工讀取千分表讀數,通常需要半天時間,其過程耗時耗力 ; 而且由于檢測方法的局限性,只能補償 4 項線性誤差。雷尼紹公司提出了 XR20 - W 無線型回轉軸校準裝置和 Axiset Check - Up 回轉軸心線檢查工具,雖然這些設備檢測精度高,但價格昂貴,并且Axiset Check - Up 的使用必須配合宏程序才能運行,受到數控系統類型的限制,目前只支持Siemens、Fanuc 等高檔數控系統。
利用球桿儀檢測五軸機床旋轉軸誤差是一種廉價、高效的誤差檢測方法。本文采用球桿儀作為 RTCP 誤差檢測的工具。只需讓球桿儀分別在xy 平面運行 360°,yz 平面運行 180°,即可快速得到 RTCP 的 4 項線性誤差和 4 項角度誤差,整個檢測及補償過程不超過半小時,并且在 RTCP誤差模型中考慮了球桿儀的安裝誤差,降低對球桿儀的安裝要求,提高了 RTCP 誤差補償的精度。
1、 基于球桿儀檢測的RTCP 誤差模型
1.1 AC雙轉臺RTCP 誤差
理論上來說,回轉軸的軸線應該與其對應的直線軸平行,同時兩個回轉軸的軸線應該正交于一點,但是實際上雙轉臺在安裝過程中不可避免地會產生偏差。AC雙轉臺的結構如圖1 所示。
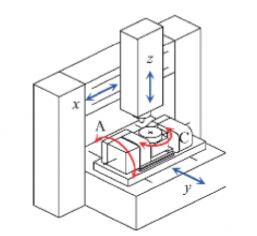
圖 1 AC 雙轉臺機床結構

圖 2 AC 雙轉臺 RTCP 誤差
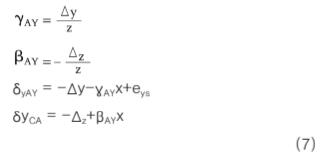
RTCP 誤差共包含 4 個線性誤差和 4 個角度誤差 ( 圖 2),分別為A軸旋轉中心 OA相 對機械坐標原點 OM 在x、y、z方向上的位置誤差δxAY δyAY δzAY 以及A軸旋轉時的3項角度誤差
除此之外,C軸旋轉中心應該與A軸旋轉中心在Y向交于一點,并且旋轉中心線與Z軸重合,但實際在安裝時不能保證,這樣就產生C軸相對A軸在Y向的位置誤差δxAY和繞Z軸角度誤差
此外,如圖 3所示,在安裝球桿儀時,由于主軸中心 線 與 C 軸 旋 轉中心線不重合,刀柄的中心線與主軸中心線也不重合,兩者共同造成安裝在主軸端的小球相對于 C 軸旋轉中心在 x 和 y 向存在初始安裝誤差 exs、eys。
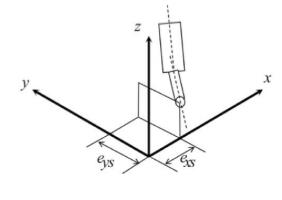
圖 3 球桿儀初始安裝誤差
1.2AC雙轉臺RTCP誤差模型
球桿儀檢測 RTCP 誤差的原理是由于五軸機床旋轉軸軸心線的位置偏差,造成球桿儀桿長的變化。從 RTCP 功能來看,RTCP 誤差補償實際上補的也是旋轉軸運動時產生的誤差,區別在于 :
1) RTCP 誤差是常數,補償的是旋轉中心相對于機床坐標系在 x、y 方向的偏差,不隨旋轉軸旋轉而變化,而旋轉軸誤差在每個旋轉角度位置處對應一誤差 ;
2) 對于雙轉臺五軸機床來說,球桿儀檢測RTCP 誤差時,桿長變化值是由主軸端小球的誤差引起的,而用球桿儀檢測旋轉軸誤差,桿長變化值是由主軸端和工作臺端小球中心點的偏移共
同引起的。因此,球桿儀檢測 RTCP 誤差只需針對主軸端小球中線點軌跡進行分析。
主軸端小球軌跡中心點偏移是由 RTCP 誤差和球桿儀安裝誤差共同引起的。對于雙轉臺五軸機床來說,RTCP 參數包含 4 個,Ri、Rj、Rk 分別表示 C 軸旋轉中心相對機床坐標原點在 x、y、z 方向的偏移 ; Jj 表示 A 軸旋轉中心相對 C 軸旋轉中心在 y 向的偏移。
理想情況下,在進行 RTCP 計算時,需要把1.1 提到的 8 項 RTCP 誤差代入到模型中,并且包含球桿儀安裝誤差,根據 AC 雙轉臺機床運動鏈,主軸端小球的運動軌跡為 :
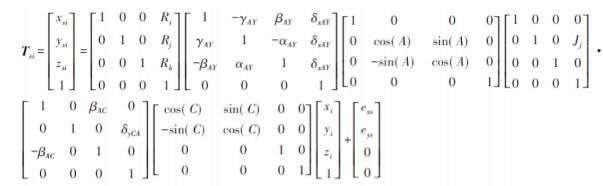
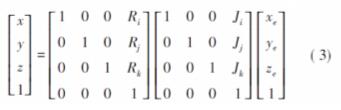
其中 : xi、yi 和 zi 是小球中心相對于 C 軸旋轉中心的坐標位置。實際情況下代入 RTCP 算法計算不包含在運動過程中的 RTCP 8 項誤差,代入 RTCP 運算的初始位置坐標值也不包括球桿儀安裝誤差,因此主軸端小球的軌跡為 :

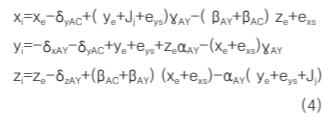
其中 xe、ye 和 ze 是實際情況下代入 RTCP 算法的編程坐標,即小球中心相對于 C 軸旋轉中心的坐標位置。主軸端小球的誤差為 E=Tse-Tsi 式 (1) 即為 RTCP 誤差模型。為了求解 xi 和 xe、yi 和 ye、zi和 ze,設在不運動的情況下,且在 A=0,C=0 處,理想情況下,在機床坐標系下小球中心點坐標為 :

實際情況下,小球初始安裝位置在機床坐標系下中心點坐標為 :
在不運動情況下,E=0,則實際坐標和理想坐標之間的關系為:
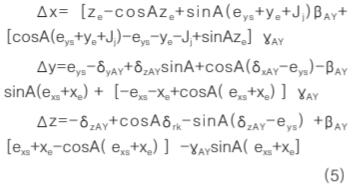
當 A 軸旋轉時,RTCP 誤差模型中的 C=0,根據式 (1) 和式 (4) 得到小球中心點在 x、y、z向的位置偏差為 :
當 C 軸旋轉時,RTCP 誤差模型中的 A=0,根據式 (1) 和式 (4) 得到小球中心點在 x、y、z向的位置偏差為 :
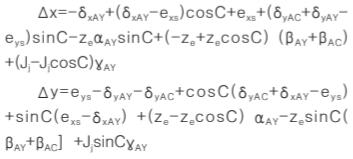
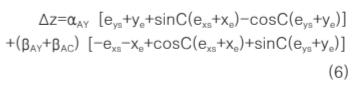
式 (5) 和式 (6) 即為基于球桿儀的 AC 雙轉臺 RTCP 誤差模型。
2 、RTCP誤差元素求解
2.1 A軸旋轉
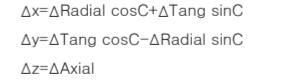
將球桿儀分別安裝在軸向 (x 向 ) 、徑向 (y向 ) 和切向 (z 向 ) 測得球桿儀的桿長變化記為 :ΔAxial,ΔRadial,ΔTang, 則 根 據 圖 4、 圖 5得出 A 軸旋轉,小球中心點在 z 軸、x 軸和 y 軸向的誤差為 :
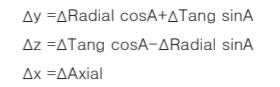
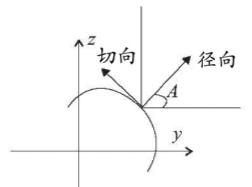
圖 4 A 軸旋轉球桿儀桿長坐標轉換
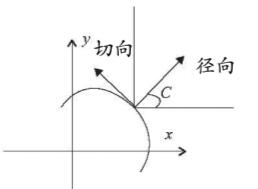
圖 5 球桿儀桿長坐標轉換
A 軸旋轉時,分別將球桿儀在 yz 平面內軸向和徑向運動代入到公式 (2) 中,分別得到 A= 0°、A= 90°、A =180°、A=-90°時的小球中心點偏移量。
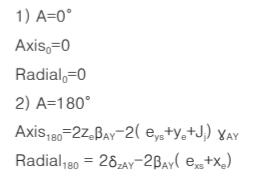
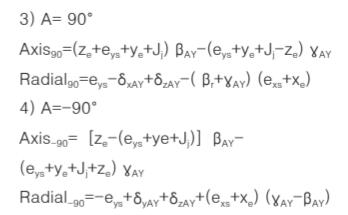
由上面可以得到 A 軸旋轉時,在 yz 平面內小球中心點圓軌跡在 y 和 z 向的偏心量,該值可以在球桿儀分析軟件中直接獲得。

通過求解以上 4 個公式,可得到如下 4 項誤差
2.2 C軸旋轉
將球桿儀分別安裝在軸向 ( z 向 ) 、徑向 ( x向 ) 和切向 ( y 向 ) 測得球桿儀的桿長變化記為 :ΔAxial,ΔRadial,ΔTang,則根據圖 3 得出 C軸旋轉,小球中心點在 z 軸、x 軸和 y 軸向的誤差為 :
同 A 軸旋轉,C 軸旋轉時,分別將球桿儀在 xy平面內軸向和徑向運動,根據式 (3) 分別得到 C = 0°、C = 90°、C =180°、C= 270°時的小球中心點偏移量

得到C軸徑向和軸向放置時,在x和y向的偏心量
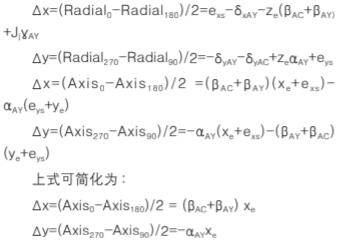
進而可求出可得到如下 4 項誤差:

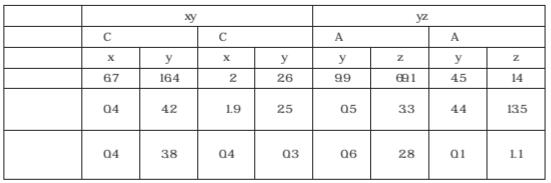
表 1 RTCP 誤差補償前后比較單位 : μm
3 、實驗驗證
為了驗證本文提出的誤差模型及相關算法的正確性,對某機床廠 VMC0656e 五軸機床做了 RTCP 誤差補償實驗。首先安裝球桿儀,根據RTCP 參數,設置當前坐標系 ( 如 G58) 的 x、y、z 值為 C 軸回轉中心在機床坐標下的值。然后在當前坐標系下,移動 x 軸到 L 的位置,調整磁力球座的位置,保證磁力座球頭坐標在當前坐標系下的 x 坐標為 L,即式 (7) 中的 x = L。式 (8) 中的 z 值可直接在 WMS 坐標系下讀出,用于誤差量的計算。將 A、C 軸運動到 0 的位置,分別記錄 SP = 0°、90°、180° 和 270° 時,球桿儀的桿長值,求出安裝誤差 exs 和 eys; 最后讓球桿儀分別在 xy 平面和 yz 平面軸向和徑向放置,運行球桿儀檢測程序,根據球桿儀分析軟件得出的偏心量以及上文推導的誤差公式,計算 8 個誤差量。
補償方法分為兩種 : 一種是只補償 4 項線性誤差,另外一種是補償線性和角度誤差。補償前和補償后的偏心量見表 1。從表中可以看出,如果只補償 RTCP 4 項線性誤差,球桿儀在 xy 平面和 yz 平面徑向運動時的精度提高了,但是球桿儀軸向放置時,偏心量變化很小。通過角度誤差補償之后,該軸向放置時的偏心量明顯減小,旋轉中心偏移量基本在 3 μm 左右。
4 、結語
分析了 AC 雙轉臺機床結構,指出 RTCP 誤差包含 4 項線性誤差、4 項角度誤差和初始安裝誤差。在此基礎上根據 AC 雙轉臺運動鏈,建立包含安裝誤差在內的 RTCP 誤差模型,并根據球桿儀檢測原理,分離出 8 項誤差。最后通過對VMC0656e 五軸機床的誤差補償,驗證了相關模型和算法的正確性及有效性。該方法可應用于其他類型的五軸機床 RTCP 誤差檢測和補償。
投稿箱:
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com
如果您有機床行業、企業相關新聞稿件發表,或進行資訊合作,歡迎聯系本網編輯部, 郵箱:skjcsc@vip.sina.com
更多相關信息

